苏州吴江网站建设广州百度推广代理公司
【ROS学习笔记5】服务通信
文章目录
- 【ROS学习笔记5】服务通信
- 前言
- 一、服务通信的理论模型
- 二、服务通信自定义srv
- 三、服务通信自定义srv的Cpp实现
- 四、服务通信自定义srv的Python实现
- 五、Reference
写在前面,本系列笔记参考的是AutoLabor的教程,具体项目地址在 这里
前言
服务通信也是ROS中一种极其常用的通信模式,服务通信是基于请求响应模式的,是一种应答机制,也即:一个节点A向另一个节点B发送请求,B接收处理请求并产生响应结果返回给A。
概念
以请求响应的方式实现不同节点之间的数据交互的通信模式
作用
用于偶然、对实时性有需求、有一定逻辑处理需求的数据传输场景
案例
实现两个数字的求和,客户端节点,运行会向服务器发送两个数字,服务器端节点接收两个数字求和并将结果响应给客户端
一、服务通信的理论模型
服务通信较之于话题通信更为简单,理论模型如下图所示,该模型中涉及三个角色:
- ROS Master (管理者)
- Server (服务端)
- Client (客户端)
ROS Master负责保管Server与Client注册的信息,并匹配话题相同的Server和Client,帮助Server与Client建立连接,建立连接后,Client发送请求消息,Server返回响应信息。
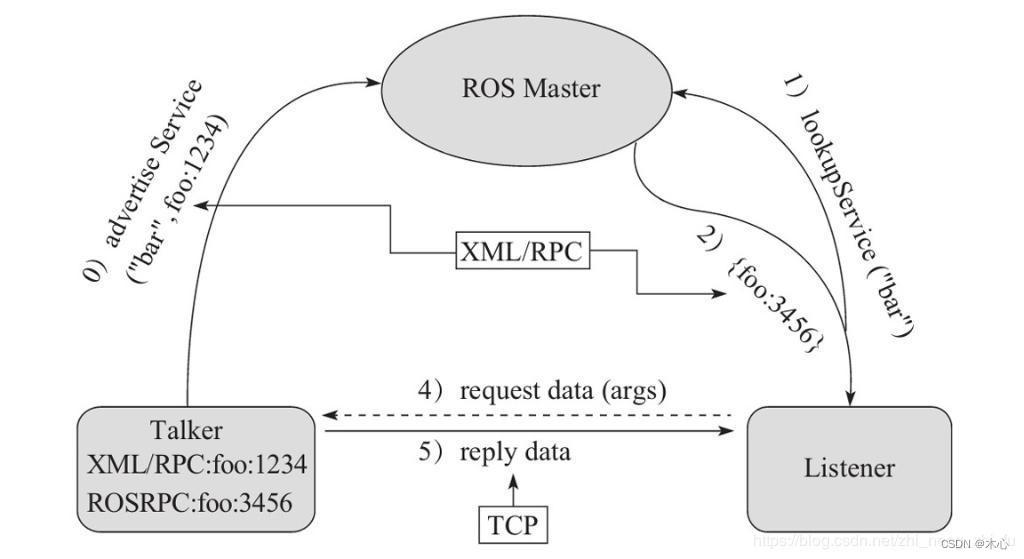
整个流程由以下步骤实现:
0.Server注册
Server 启动后,会通过RPC在 ROS Master 中注册自身信息,其中包含提供的服务的名称。ROS Master 会将节点的注册信息加入到注册表中。
1.Client注册
Client 启动后,也会通过RPC在 ROS Master 中注册自身信息,包含需要请求的服务的名称。ROS Master 会将节点的注册信息加入到注册表中
2.ROS Master实现信息匹配
ROS Master 会根据注册表中的信息匹配Server和 Client,并通过 RPC 向 Client 发送 Server 的 TCP 地址信息。
3.Client发送请求
Client 根据步骤2 响应的信息,使用 TCP 与 Server 建立网络连接,并发送请求数据。
4.Server发送响应
Server 接收、解析请求的数据,并产生响应结果返回给 Client。
二、服务通信自定义srv
需求
服务通信中,客户端提交两个整数至服务端,服务端求和并响应结果到客户端,请创建服务器与客户端通信的数据载体
流程
srv文件内的可用数据类型与msg文件一致,且定义srv实现流程与自定义msg实现流程类似:
- 按照固定格式创建srv文件
- 编辑配置文件
- 编译生成中间文件
1、定义srv文件
服务通信中,数据分为两部分,请求与响应,在srv文件中请求和响应使用---进行分割,具体实现如下:
功能包下新建srv目录,添加xxx.srv文件,内容:
# 客户端请求时发送的两个数字
int32 num1
int32 num2
---
# 服务器响应发送的数据
int32 sum
2、编辑配置文件
package.xml中添加编译依赖与执行依赖
<build_depend>message_generation</build_depend><exec_depend>message_runtime</exec_depend><!-- exce_depend 以前对应的是 run_depend 现在非法-->
CMakeLists.txt编辑srv相关配置
find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgsmessage_generation
)
# 需要加入 message_generation,必须有 std_msgs
add_service_files(FILESAddInts.srv
)
generate_messages(DEPENDENCIESstd_msgs
)
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES plumbing_server_clientCATKIN_DEPENDS roscpp rospy std_msgs message_runtime
# DEPENDS system_lib
)
注意: 官网没有在 catkin_package 中配置 message_runtime,经测试配置也可以
3、编译
编译后的中间文件查看:
C++ 需要调用的中间文件(…/工作空间/devel/include/包名/xxx.h)
Python 需要调用的中间文件(…/工作空间/devel/lib/python3/dist-packages/包名/srv)
后续调用相关 srv 时,是从这些中间文件调用的
三、服务通信自定义srv的Cpp实现
分析:
在模型实现中,ROS Master不需要再实现,而连接的建立也已经被封装了,需要关注的点有:
- 服务端
- 客户端
- 数据
流程:
- 编写服务端实现
- 编写客户端实现
- 编辑配置文件
- 编译并执行
0、vscode配置
需要像之前自定义 msg 实现一样配置c_cpp_properies.json 文件,如果以前已经配置且没有变更工作空间,可以忽略,如果需要配置,配置方式与之前相同:
{"configurations": [{"browse": {"databaseFilename": "","limitSymbolsToIncludedHeaders": true},"includePath": ["/opt/ros/noetic/include/**","/usr/include/**","/xxx/yyy工作空间/devel/include/**" //配置 head 文件的路径 ],"name": "ROS","intelliSenseMode": "gcc-x64","compilerPath": "/usr/bin/gcc","cStandard": "c11","cppStandard": "c++17"}],"version": 4
}
1、服务端实现
/*需求: 编写两个节点实现服务通信,客户端节点需要提交两个整数到服务器服务器需要解析客户端提交的数据,相加后,将结果响应回客户端,客户端再解析服务器实现:1.包含头文件2.初始化 ROS 节点3.创建 ROS 句柄4.创建 服务 对象5.回调函数处理请求并产生响应6.由于请求有多个,需要调用 ros::spin()*/
#include "ros/ros.h"
#include "demo03_server_client/AddInts.h"// bool 返回值由于标志是否处理成功
bool doReq(demo03_server_client::AddInts::Request& req,demo03_server_client::AddInts::Response& resp){int num1 = req.num1;int num2 = req.num2;ROS_INFO("服务器接收到的请求数据为:num1 = %d, num2 = %d",num1, num2);//逻辑处理if (num1 < 0 || num2 < 0){ROS_ERROR("提交的数据异常:数据不可以为负数");return false;}//如果没有异常,那么相加并将结果赋值给 respresp.sum = num1 + num2;return true;}int main(int argc, char *argv[])
{setlocale(LC_ALL,"");// 2.初始化 ROS 节点ros::init(argc,argv,"AddInts_Server");// 3.创建 ROS 句柄ros::NodeHandle nh;// 4.创建 服务 对象ros::ServiceServer server = nh.advertiseService("AddInts",doReq);ROS_INFO("服务已经启动....");// 5.回调函数处理请求并产生响应// 6.由于请求有多个,需要调用 ros::spin()ros::spin();return 0;
}
2、客户端实现
/*需求: 编写两个节点实现服务通信,客户端节点需要提交两个整数到服务器服务器需要解析客户端提交的数据,相加后,将结果响应回客户端,客户端再解析服务器实现:1.包含头文件2.初始化 ROS 节点3.创建 ROS 句柄4.创建 客户端 对象5.请求服务,接收响应实现参数的动态提交:1.格式: rosrun xxxx xxxx 12 342.节点执行时,需要获取命令中的参数,并组织缩进request*/
// 1.包含头文件
#include "ros/ros.h"
#include "demo03_server_client/AddInts.h"int main(int argc, char *argv[])
{setlocale(LC_ALL,"");// 调用时动态传值,如果通过 launch 的 args 传参,需要传递的参数个数 +3if (argc != 3)// if (argc != 5)//launch 传参(0-文件路径 1传入的参数 2传入的参数 3节点名称 4日志路径){ROS_ERROR("请提交两个整数");return 1;}// 2.初始化 ROS 节点ros::init(argc,argv,"AddInts_Client");// 3.创建 ROS 句柄ros::NodeHandle nh;// 4.创建 客户端 对象ros::ServiceClient client = nh.serviceClient<demo03_server_client::AddInts>("AddInts");//等待服务启动成功//方式1ros::service::waitForService("AddInts");//方式2// client.waitForExistence();// 5.组织请求数据demo03_server_client::AddInts ai;ai.request.num1 = atoi(argv[1]);ai.request.num2 = atoi(argv[2]);// 6.发送请求,返回 bool 值,标记是否成功bool flag = client.call(ai);// 7.处理响应if (flag){ROS_INFO("请求正常处理,响应结果:%d",ai.response.sum);}else{ROS_ERROR("请求处理失败....");return 1;}return 0;
}
3、配置CMakeLists.txt
add_executable(AddInts_Server src/AddInts_Server.cpp)
add_executable(AddInts_Client src/AddInts_Client.cpp)add_dependencies(AddInts_Server ${PROJECT_NAME}_gencpp)
add_dependencies(AddInts_Client ${PROJECT_NAME}_gencpp)target_link_libraries(AddInts_Server${catkin_LIBRARIES}
)
target_link_libraries(AddInts_Client${catkin_LIBRARIES}
)
4、执行
流程:
- 需要先启动服务:
rosrun 包名 服务名- 然后再调用客户端:
rosrun 包名 客户端 参数1 参数2
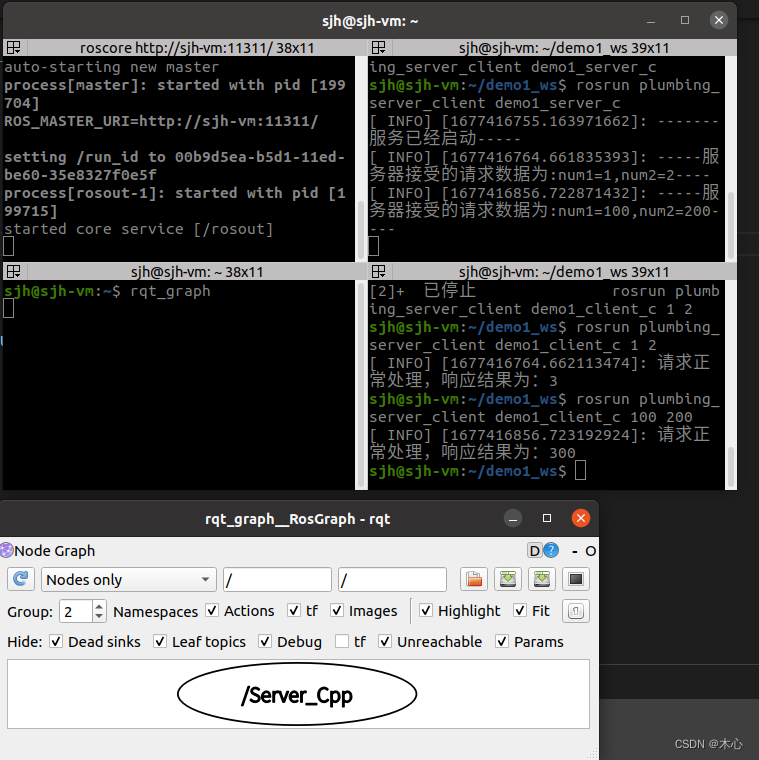
结果:
会根据提交的数据响应相加后的结果
注意:
如果先启动客户端,那么会导致运行失败
优化:
在客户端发送请求前添加:client.waitForExistence();或者ros::service::waitForService("AddInts");,这是一个阻塞函数,只有服务启动成功后才会继续执行,此处可以使用launch文件进行优化,但是需要注意args传参的特点
最后实现的效果如下:
四、服务通信自定义srv的Python实现
流程:
- 编写服务端实现
- 编写客户端实现
- 为Python文件添加可执行权限
- 编辑配置文件
- 编译并执行
0、vscode配置
需要像之前自定义 msg 实现一样配置settings.json 文件,如果以前已经配置且没有变更工作空间,可以忽略,如果需要配置,配置方式与之前相同:
{"python.autoComplete.extraPaths": ["/opt/ros/noetic/lib/python3/dist-packages",]
}
1、服务端
#! /usr/bin/env python
"""需求: 编写两个节点实现服务通信,客户端节点需要提交两个整数到服务器服务器需要解析客户端提交的数据,相加后,将结果响应回客户端,客户端再解析服务器端实现:1.导包2.初始化 ROS 节点3.创建服务对象4.回调函数处理请求并产生响应5.spin 函数"""
# 1.导包
import rospy
from demo03_server_client.srv import AddInts,AddIntsRequest,AddIntsResponse
# 回调函数的参数是请求对象,返回值是响应对象
def doReq(req):# 解析提交的数据sum = req.num1 + req.num2rospy.loginfo("提交的数据:num1 = %d, num2 = %d, sum = %d",req.num1, req.num2, sum)# 创建响应对象,赋值并返回# resp = AddIntsResponse()# resp.sum = sumresp = AddIntsResponse(sum)return respif __name__ == "__main__":# 2.初始化 ROS 节点rospy.init_node("addints_server_p")# 3.创建服务对象server = rospy.Service("AddInts",AddInts,doReq)# 4.回调函数处理请求并产生响应# 5.spin 函数rospy.spin()
2、客户端
#! /usr/bin/env python"""需求: 编写两个节点实现服务通信,客户端节点需要提交两个整数到服务器服务器需要解析客户端提交的数据,相加后,将结果响应回客户端,客户端再解析客户端实现:1.导包2.初始化 ROS 节点3.创建请求对象4.发送请求5.接收并处理响应优化:加入数据的动态获取"""
#1.导包
import rospy
from demo03_server_client.srv import *
import sysif __name__ == "__main__":#优化实现if len(sys.argv) != 3:rospy.logerr("请正确提交参数")sys.exit(1)# 2.初始化 ROS 节点rospy.init_node("AddInts_Client_p")# 3.创建请求对象client = rospy.ServiceProxy("AddInts",AddInts)# 请求前,等待服务已经就绪# 方式1:# rospy.wait_for_service("AddInts")# 方式2client.wait_for_service()# 4.发送请求,接收并处理响应# 方式1# resp = client(3,4)# 方式2# resp = client(AddIntsRequest(1,5))# 方式3req = AddIntsRequest()# req.num1 = 100# req.num2 = 200 #优化req.num1 = int(sys.argv[1])req.num2 = int(sys.argv[2]) resp = client.call(req)rospy.loginfo("响应结果:%d",resp.sum)
3、设置权限
终端进入scripts执行
chmod +x *.py
4、配置CMakeLists.txt
catkin_install_python(PROGRAMSscripts/AddInts_Server_p.py scripts/AddInts_Client_p.pyDESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
5、执行
流程:
- 需要先启动服务:
rosrun 包名 服务- 然后再调用客户端:
rosrun 包名 客户端 参数1 参数2
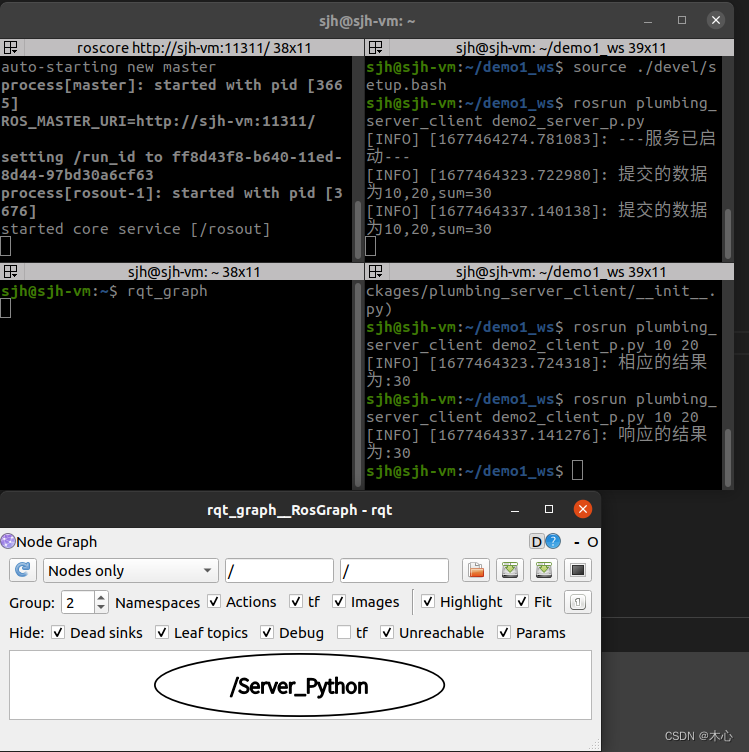
结果:
会根据提交的参数响应相加后的结果
一个示例的结果:
五、Reference
http://www.autolabor.com.cn/book/ROSTutorials/di-2-zhang-ros-jia-gou-she-ji/23-fu-wu-tong-xin/222-fu-wu-tong-xin-zi-ding-yi-srv.html