微信恢复官方网站怎么在网上推销产品
1. 功能描述
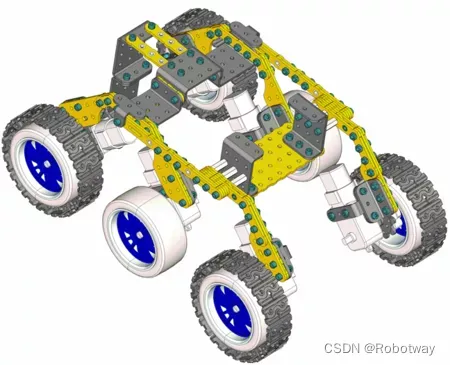
行星探测车(Planetary Rover)是一种用于进行科学探索和勘测任务的无人车辆,它们被设计成能够适应各种复杂的地形条件和极端环境,以便收集数据、拍摄照片、采集样本等。行星探测车通常包含以下主要组件和功能:
① 底盘和轮子系统:底盘提供了行星探测车的支撑结构,轮子系统使其能够移动。轮子通常采用特殊设计,以适应不同地质条件和障碍物,并提供良好的牵引力和稳定性。
② 动力系统:行星探测车通常由电池或太阳能电池板供电,这些能源会驱动电动机,使车辆能够移动和执行其它任务。
③ 导航与控制系统:导航和控制系统帮助行星探测车感知周围的环境并自主导航,它们通常包括惯性测量单元(IMU)、陀螺仪、加速度、摄像头、激光雷达、GPS等传感器。
④ 通信系统:行星探测车需要进行通信以接收指令和发送数据,通常会使用无线电通信设备实现远距离通信。
本文示例将实现R261样机行星探测车在行进过程中避障,并且当光强传感器触发时实现太阳翼展开的功能。

2. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra主控板(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1扩展板 |
| 传感器 | 光强传感器 |
| 近红外传感器 | |
| 电池 | 7.4V锂电池 |
电路连接图如下所示:
3. 功能实现
编程环境:Arduino 1.8.19
下面提供一个实现行星探测车在行进过程中避障,并且当光强传感器触发时实现太阳翼展开功能的参考程序(sketch_sep12a.ino):
/*------------------------------------------------------------------------------------版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.Distributed under MIT license.See file LICENSE for detail or copy athttps://opensource.org/licenses/MITby 机器谱 2023-09-21 https://www.robotway.com/------------------------------*/#include <Servo.h>Servo leftSolarPanel; // 左太阳翼舵机Servo rightSolarPanel; // 右太阳翼舵机Servo mast; // 桅杆舵机int irSensorPin = A0; // 红外传感器的引脚(根据实际连接修改)int lightSensorPin =A5; // 光强传感器的引脚(根据实际连接修改)bool irSensorTriggered = false; // 用于跟踪红外传感器触发状态void setup() {pinMode(irSensorPin, INPUT);pinMode(lightSensorPin, INPUT);leftSolarPanel.attach(4); // 左太阳翼舵机连接到数字引脚 4rightSolarPanel.attach(3); // 右太阳翼舵机连接到数字引脚 3mast.attach(7); // 桅杆舵机连接到数字引脚 7}void loop() {// 读取红外传感器状态int irSensorValue = digitalRead(irSensorPin);// 如果红外传感器触发,小车后退并左转if (irSensorValue == HIGH && !irSensorTriggered) {irSensorTriggered = true;moveBackward();leftTurn();} else if (irSensorValue == HIGH && irSensorTriggered) {irSensorTriggered = false;moveForward();rightTurn();} else {// 如果未触发红外传感器,停止小车运动stopCar();}// 读取光强传感器状态int lightSensorValue = analogRead(lightSensorPin);// 如果光强传感器触发,执行太阳翼和桅杆展开和闭合操作if (lightSensorValue > 500) {expandSolarPanelsAndMast();} else {stopSolarPanelsAndMast();}}// 后退void moveBackward() {digitalWrite( 5 , HIGH ); //右轮后退digitalWrite( 6 , LOW );digitalWrite( 9 , HIGH ); //左轮后退digitalWrite( 10 , LOW);}// 左转void leftTurn() {digitalWrite( 5 , HIGH );digitalWrite( 6 , LOW );digitalWrite( 9 , LOW );digitalWrite( 10 , LOW );}// 前进void moveForward() {digitalWrite( 5 , LOW ); //右轮前进digitalWrite( 6 , HIGH );digitalWrite( 9 , LOW ); //左轮前进digitalWrite( 10 , HIGH );}// 右转void rightTurn() {digitalWrite( 5 , LOW );digitalWrite( 6 , LOW );digitalWrite( 9 , HIGH );digitalWrite( 10 , LOW );}// 停止void stopCar() {analogWrite(5 , 0);analogWrite(6 , 0);analogWrite(9 , 0);analogWrite(10 , 0);}// 太阳翼和桅杆展开操作void expandSolarPanelsAndMast() {// 左太阳翼展开至180°setServoAngle(leftSolarPanel, 180);delay(500); // 暂停0.5秒// 右太阳翼展开至180°setServoAngle(rightSolarPanel, 180);delay(500); // 暂停0.5秒// 桅杆展开至90°setServoAngle(mast, 90);delay(500); // 暂停0.5秒}// 太阳翼和桅杆关闭操作void stopSolarPanelsAndMast() {// 桅杆闭合至0°setServoAngle(mast, 0);// 左太阳翼闭合至0°setServoAngle(leftSolarPanel, 0);// 右太阳翼闭合至0°setServoAngle(rightSolarPanel, 0);}// 函数用于设置舵机角度,并控制舵机旋转速度void setServoAngle(Servo servo, int targetAngle) {int currentAngle = servo.read();int step = 1; // 步进值,可根据需要调整int delayTime = 20; // 延迟时间,可根据需要调整if (targetAngle > currentAngle) {for (int angle = currentAngle; angle <= targetAngle; angle += step) {servo.write(angle);delay(delayTime);}} else if (targetAngle < currentAngle) {for (int angle = currentAngle; angle >= targetAngle; angle -= step) {servo.write(angle);delay(delayTime);}}}4. 扩展样机
本样机的底盘方案是【R255】号机构,如下图所示:
程序源代码及样机3D文件资料详见 行星探测车-概述