怎么做网站站内优化关键词营销优化
目录
概述
1 硬件接口
2 添加ICM20608的设备树信息
2.1 使用i.MX Pins Tool v6配置SPI引脚
2.2 配置设备树
2.3 编译.dts
2.4 在板卡中更新设备树
3 编写驱动程序
3.1 创建设备匹配表
3.2 重要函数介绍
3.2.1 初始化函数
3.2.2 写寄存器函数
3.2.3 读寄存器函数
3.2.3 完整驱动代码
3.2.3.1 驱动代码程序
3.2.3.1 驱动代码程序Makefile
4 测试驱动安装
4.1 编译驱动程序
4.2 在板卡上安装驱动
5 验证和测试
5.1 编写测试程序
5.1.1 测试程序源代码
5.1.2 测试程序Makefile
5.2 运行测试代码
5.3 结论
概述
本文详细介绍了如何在Linux platform tree框架下,编写一个基于SPI接口的驱动程序。笔者使用ICM20606芯片,应用SPI工作方式操作该芯片,实现其驱动程序。还编写了一个测试程序,并在板卡上运行测试程序。验证驱动的可靠性。
源代码地址: ICM20608linux环境下的驱动程序资源-CSDN文库
ICM20608linux环境下的测试程序资源-CSDN文库
1 硬件接口
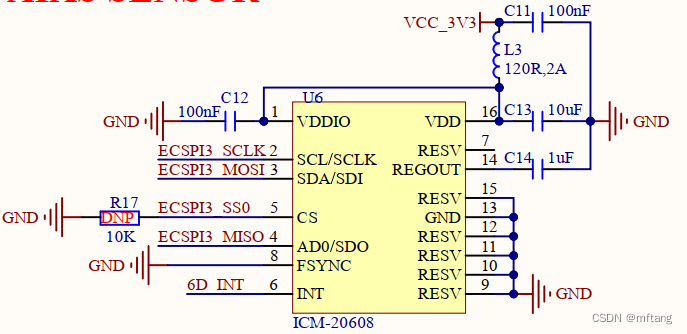
本文主要使用SPI总线驱动ICM20608芯片,如下内容会详细介绍设备树更新,驱动代码的实现等内容。由原理图可得,ICM20608与MCU的对应关系如下:
| ICM20608 | MCU | 注释 |
| SDO | MX6UL_PAD_UART2_RTS_B__ECSPI3_MISO | 主设备输入、从设备输出线 |
| SDI | MX6UL_PAD_UART2_CTS_B__ECSPI3_MOSI | 主设备输出、从设备输入线 |
| SCLK | MX6UL_PAD_UART2_RX_DATA__ECSPI3_SCLK | 时钟线 |
| CS | MX6UL_PAD_UART2_TX_DATA__GPIO1_IO20 | 从设备选择线 |
| INT | JTAG_MOD_SP_TX | 中断引脚 |
板卡上ICM-20608的原理图
2 添加ICM20608的设备树信息
2.1 使用i.MX Pins Tool v6配置SPI引脚
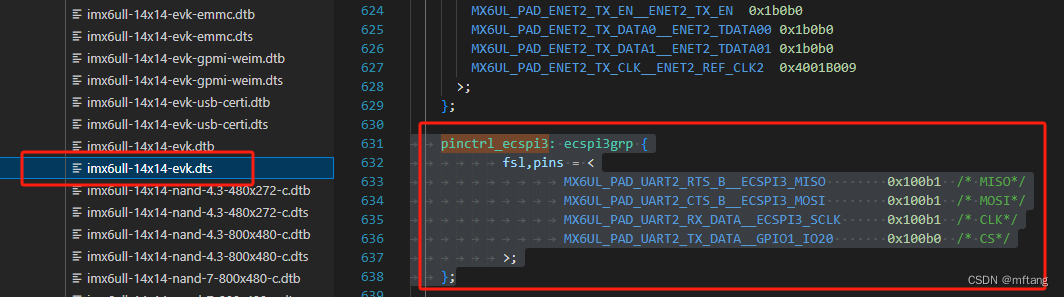
使用i.MX Pins Tool v6配置引脚,配置对应的引脚为SPI,配置参数如下:
pinctrl_ecspi3: ecspi3grp {fsl,pins = <MX6UL_PAD_UART2_RTS_B__ECSPI3_MISO 0x100b1 /* MISO*/MX6UL_PAD_UART2_CTS_B__ECSPI3_MOSI 0x100b1 /* MOSI*/MX6UL_PAD_UART2_RX_DATA__ECSPI3_SCLK 0x100b1 /* CLK */MX6UL_PAD_UART2_TX_DATA__GPIO1_IO20 0x100b0 /* CS */>;};在.dts文件中的位置为:
2.2 配置设备树
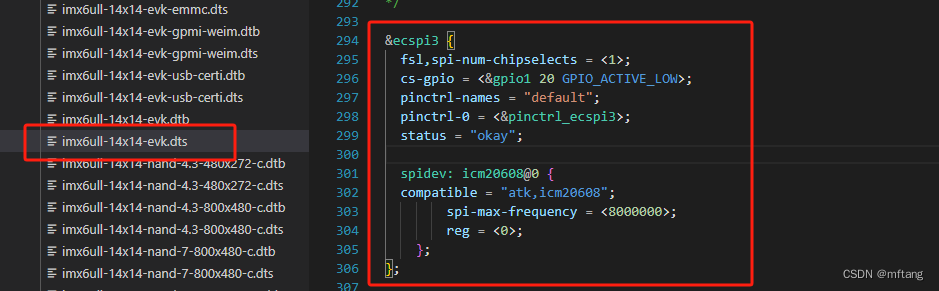
配置设备树的目的,是将SPI的工作IO引脚和外围的设备对应起来,方便在驱动程序中匹配该参数信息。在.dts文件中添加如下代码:
&ecspi3 {fsl,spi-num-chipselects = <1>;cs-gpio = <&gpio1 20 GPIO_ACTIVE_LOW>;pinctrl-names = "default";pinctrl-0 = <&pinctrl_ecspi3>;status = "okay";spidev: icm20608@0 {compatible = "atk,icm20608";spi-max-frequency = <8000000>;reg = <0>;};
};spi的配置参数在.dts文件中的位置为:
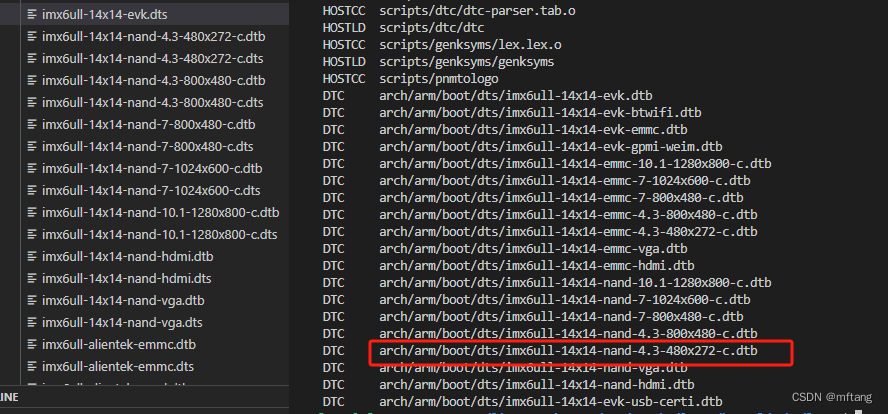
2.3 编译.dts
使用命令编译代码。然后将生成的.dtb文件发送到NFS的共享目录下,方便在板卡使用该文件
make dtbs编译后,得到了.dtb
2.4 在板卡中更新设备树
1) 将NFS中共享的设备树文件copy到运行目录中

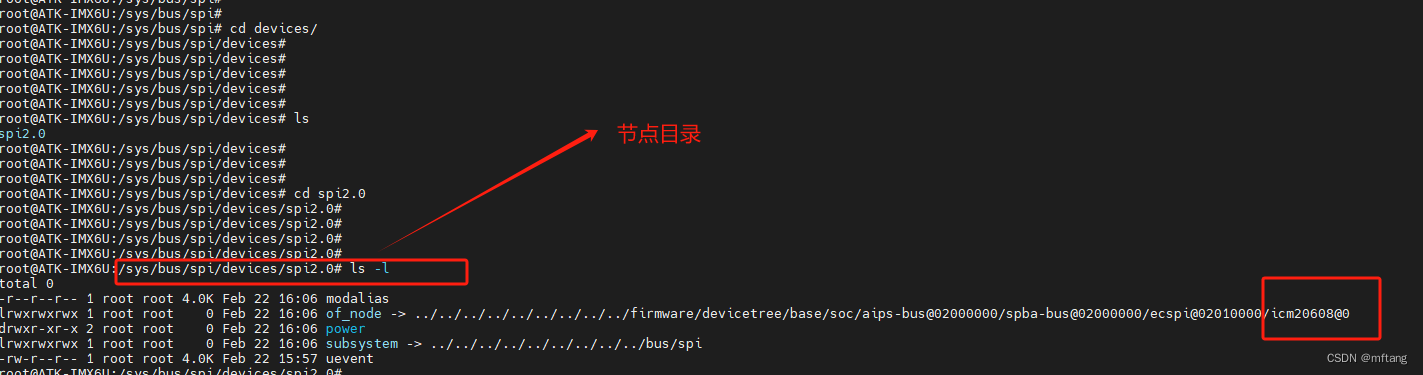
2)reboot板卡后,内核会重新读取.dtb文件。然后在/sys/bus/spi/devices/spi2.0目录下查看板卡device tree,使用如下命令:
cd /sys/bus/spi/devices/spi2.0/
ls -l得到节点信息如下:
3 编写驱动程序
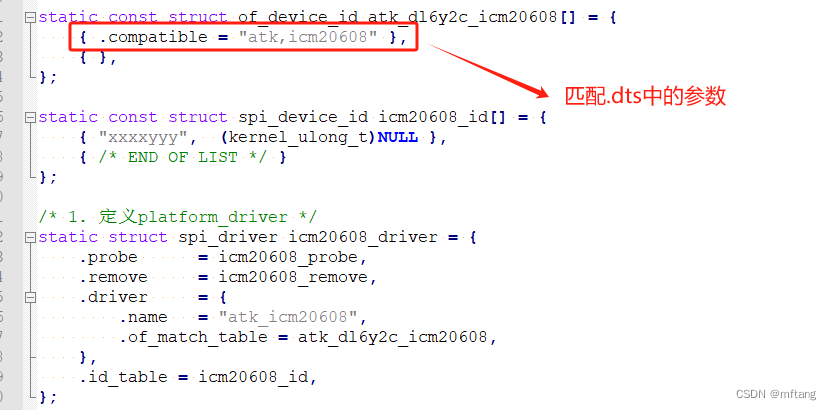
3.1 创建设备匹配表
其目的是和设备树中参数对应起来
static const struct of_device_id atk_dl6y2c_icm20608[] = {{ .compatible = "atk,icm20608" },{ },
};static const struct spi_device_id icm20608_id[] = {{ "xxxxyyy", (kernel_ulong_t)NULL },{ /* END OF LIST */ }
};/* 1. 定义platform_driver */
static struct i2c_driver icm20608_driver = {.probe = icm20608_probe,.remove = icm20608_remove,.driver = {.name = "atk_icm20608",.of_match_table = atk_dl6y2c_icm20608,},.id_table = icm20608_id,
};在.c 文件中的代码信息如下:
3.2 重要函数介绍
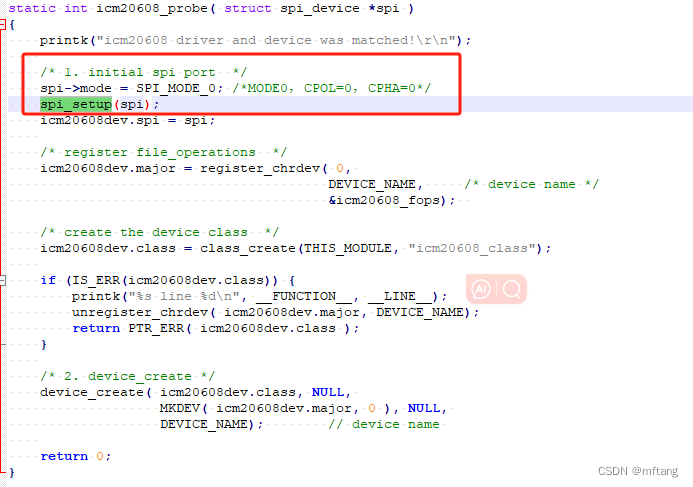
3.2.1 初始化函数
在初始化函数中,通过调用spi_setup 来初始化spi接口,该函数放在prope接口中完成
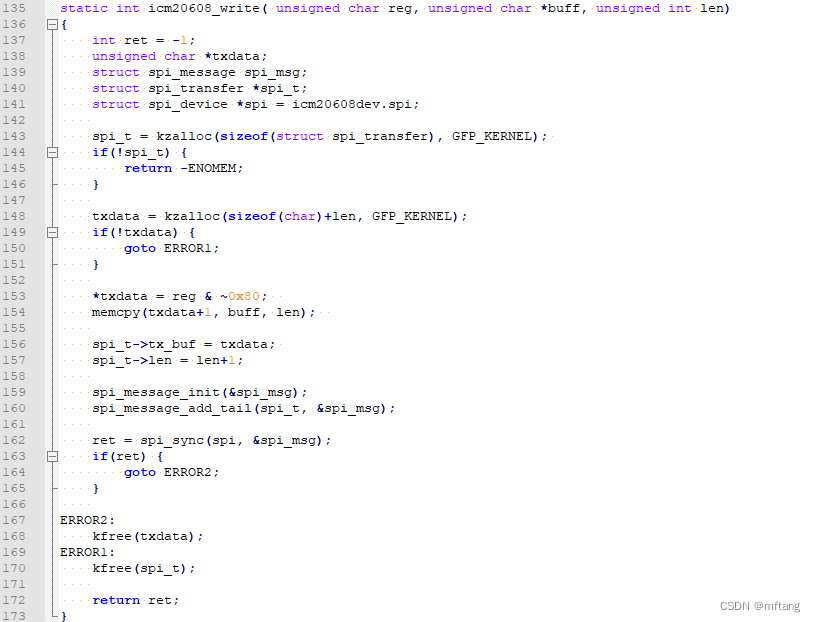
3.2.2 写寄存器函数
第148行,写寄存器数据时,寄存器地址信息,bit-7必须为0
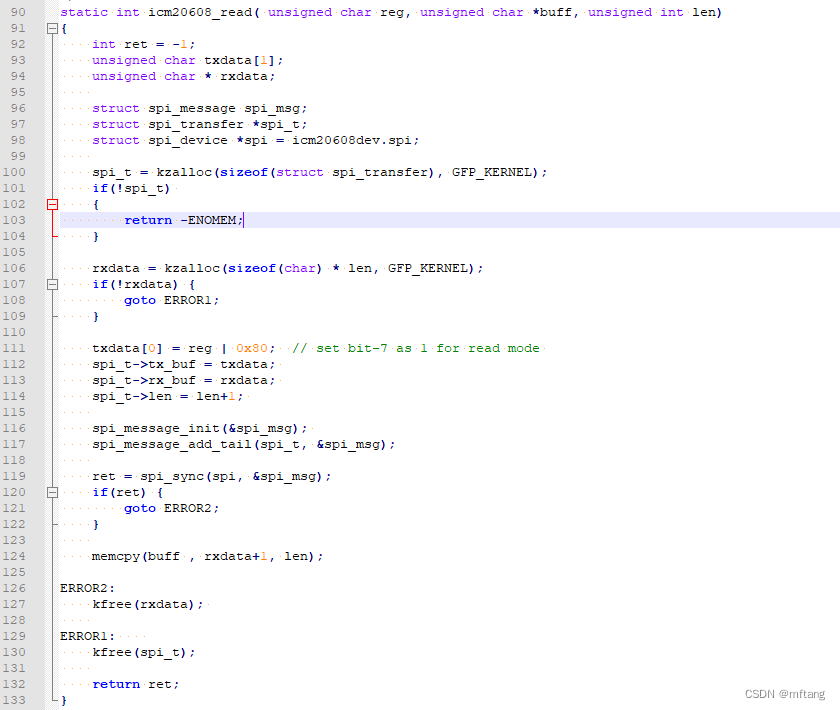
3.2.3 读寄存器函数
第111行,读寄存器数据时,必须传递一个寄存器地址信息,且bit-7必须为1
3.2.3 完整驱动代码
3.2.3.1 驱动代码程序
/***************************************************************
Copyright 2024-2029. All rights reserved.
文件名 : drv_17_icm20608.c
作者 : tangmingfei2013@126.com
版本 : V1.0
描述 : icm20608 驱动程序
其他 : 无
日志 : 初版V1.0 2024/1/30 使用方法:
1) 在.dts文件中定义节点信息
&ecspi3 {fsl,spi-num-chipselects = <1>;cs-gpio = <&gpio1 20 GPIO_ACTIVE_LOW>;pinctrl-names = "default";pinctrl-0 = <&pinctrl_ecspi3>;status = "okay";spidev: icm20608@0 {compatible = "atk,icm20608";spi-max-frequency = <8000000>;reg = <0>;};
};2) 在驱动匹配列表
static const struct of_device_id icm20608_of_match[] = {{ .compatible = "atk,icm20608" },{ } // Sentinel
};
***************************************************************/
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ktime.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of_gpio.h>
#include <linux/semaphore.h>
#include <linux/timer.h>
#include <linux/irq.h>
#include <linux/wait.h>
#include <linux/poll.h>
#include <linux/fs.h>
#include <linux/fcntl.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#include <linux/spi/spi.h>
#include <linux/of.h>
#include <linux/of_address.h>#define ICM20_SELF_TEST_X_GYRO 0x00
#define ICM20_SELF_TEST_Y_GYRO 0x01
#define ICM20_SELF_TEST_Z_GYRO 0x02
#define ICM20_SELF_TEST_X_ACCEL 0x0D
#define ICM20_SELF_TEST_Y_ACCEL 0x0E
#define ICM20_SELF_TEST_Z_ACCEL 0x0F/* 陀螺仪静态偏移 */
#define ICM20_XG_OFFS_USRH 0x13
#define ICM20_XG_OFFS_USRL 0x14
#define ICM20_YG_OFFS_USRH 0x15
#define ICM20_YG_OFFS_USRL 0x16
#define ICM20_ZG_OFFS_USRH 0x17
#define ICM20_ZG_OFFS_USRL 0x18#define ICM20_SMPLRT_DIV 0x19
#define ICM20_CONFIG 0x1A
#define ICM20_GYRO_CONFIG 0x1B
#define ICM20_ACCEL_CONFIG 0x1C
#define ICM20_ACCEL_CONFIG2 0x1D
#define ICM20_LP_MODE_CFG 0x1E
#define ICM20_ACCEL_WOM_THR 0x1F
#define ICM20_FIFO_EN 0x23
#define ICM20_FSYNC_INT 0x36
#define ICM20_INT_PIN_CFG 0x37
#define ICM20_INT_ENABLE 0x38
#define ICM20_INT_STATUS 0x3A/* 加速度输出 */
#define ICM20_ACCEL_XOUT_H 0x3B
#define ICM20_ACCEL_XOUT_L 0x3C
#define ICM20_ACCEL_YOUT_H 0x3D
#define ICM20_ACCEL_YOUT_L 0x3E
#define ICM20_ACCEL_ZOUT_H 0x3F
#define ICM20_ACCEL_ZOUT_L 0x40/* 温度输出 */
#define ICM20_TEMP_OUT_H 0x41
#define ICM20_TEMP_OUT_L 0x42/* 陀螺仪输出 */
#define ICM20_GYRO_XOUT_H 0x43
#define ICM20_GYRO_XOUT_L 0x44
#define ICM20_GYRO_YOUT_H 0x45
#define ICM20_GYRO_YOUT_L 0x46
#define ICM20_GYRO_ZOUT_H 0x47
#define ICM20_GYRO_ZOUT_L 0x48#define ICM20_SIGNAL_PATH_RESET 0x68
#define ICM20_ACCEL_INTEL_CTRL 0x69
#define ICM20_USER_CTRL 0x6A
#define ICM20_PWR_MGMT_1 0x6B
#define ICM20_PWR_MGMT_2 0x6C
#define ICM20_FIFO_COUNTH 0x72
#define ICM20_FIFO_COUNTL 0x73
#define ICM20_FIFO_R_W 0x74
#define ICM20_WHO_AM_I 0x75/* 加速度静态偏移 */
#define ICM20_XA_OFFSET_H 0x77
#define ICM20_XA_OFFSET_L 0x78
#define ICM20_YA_OFFSET_H 0x7A
#define ICM20_YA_OFFSET_L 0x7B
#define ICM20_ZA_OFFSET_H 0x7D
#define ICM20_ZA_OFFSET_L 0x7E#define DEVICE_NAME "icm20608" // dev/icm20608/* icm20608dev设备结构体 */
struct icm20608stru_dev{dev_t devid; /* 设备号 */struct cdev cdev; /* cdev */struct class *class; /* 类 */struct device *device; /* 设备 */int major; /* 主设备号 */struct spi_device *spi;
};struct icm20608stru_value{signed int gyro_x_adc; /* 陀螺仪X轴原始值 */signed int gyro_y_adc; /* 陀螺仪Y轴原始值 */signed int gyro_z_adc; /* 陀螺仪Z轴原始值 */signed int accel_x_adc; /* 加速度计X轴原始值 */signed int accel_y_adc; /* 加速度计Y轴原始值 */signed int accel_z_adc; /* 加速度计Z轴原始值 */signed int temp_adc; /* 温度原始值 */
};/* read or write icm20608 structure */static struct icm20608stru_dev icm20608dev;/*icm20608 driver
*/
static int icm20608_read( unsigned char reg, unsigned char *buff, unsigned int len)
{int ret = -1;unsigned char txdata[1];unsigned char * rxdata;struct spi_message spi_msg;struct spi_transfer *spi_t;struct spi_device *spi = icm20608dev.spi;spi_t = kzalloc(sizeof(struct spi_transfer), GFP_KERNEL);if(!spi_t) {return -ENOMEM;}rxdata = kzalloc(sizeof(char) * len, GFP_KERNEL);if(!rxdata) {goto ERROR1;}txdata[0] = reg | 0x80; // set bit-7 as 1 for read mode spi_t->tx_buf = txdata; spi_t->rx_buf = rxdata; spi_t->len = len+1; spi_message_init(&spi_msg); spi_message_add_tail(spi_t, &spi_msg);ret = spi_sync(spi, &spi_msg);if(ret) {goto ERROR2;}memcpy(buff , rxdata+1, len);ERROR2:kfree(rxdata); ERROR1: kfree(spi_t);return ret;
}static int icm20608_write( unsigned char reg, unsigned char *buff, unsigned int len)
{int ret = -1;unsigned char *txdata;struct spi_message spi_msg;struct spi_transfer *spi_t;struct spi_device *spi = icm20608dev.spi;spi_t = kzalloc(sizeof(struct spi_transfer), GFP_KERNEL); if(!spi_t) {return -ENOMEM;}txdata = kzalloc(sizeof(char)+len, GFP_KERNEL);if(!txdata) {goto ERROR1;}*txdata = reg & ~0x80; memcpy(txdata+1, buff, len); spi_t->tx_buf = txdata; spi_t->len = len+1;spi_message_init(&spi_msg);spi_message_add_tail(spi_t, &spi_msg);ret = spi_sync(spi, &spi_msg);if(ret) {goto ERROR2;}ERROR2:kfree(txdata);
ERROR1:kfree(spi_t);return ret;
}static void icm20608_readdata(struct icm20608stru_value *dev)
{unsigned char data[14] = { 0 };icm20608_read(ICM20_ACCEL_XOUT_H, data, 14);dev->accel_x_adc = (signed short)((data[0] << 8) | data[1]); dev->accel_y_adc = (signed short)((data[2] << 8) | data[3]); dev->accel_z_adc = (signed short)((data[4] << 8) | data[5]); dev->temp_adc = (signed short)((data[6] << 8) | data[7]); dev->gyro_x_adc = (signed short)((data[8] << 8) | data[9]); dev->gyro_y_adc = (signed short)((data[10] << 8) | data[11]);dev->gyro_z_adc = (signed short)((data[12] << 8) | data[13]);
}static void icm20608_reginit(void)
{unsigned char value = 0;unsigned char buff[1];buff[0] = 0x80;icm20608_write( ICM20_PWR_MGMT_1, buff , 1);mdelay(50);buff[0] = 0x01;icm20608_write( ICM20_PWR_MGMT_1, buff , 1);mdelay(50);icm20608_read(ICM20_WHO_AM_I, &value, 1);printk("ICM20608 ID = %#X\r\n", value); buff[0] = 0x00;icm20608_write( ICM20_SMPLRT_DIV, buff, 1);buff[0] = 0x18;icm20608_write( ICM20_GYRO_CONFIG, buff, 1);buff[0] = 0x18;icm20608_write( ICM20_ACCEL_CONFIG, buff, 1);buff[0] = 0x04;icm20608_write( ICM20_CONFIG, buff, 1);buff[0] = 0x04;icm20608_write( ICM20_ACCEL_CONFIG2, buff, 1);buff[0] = 0x00;icm20608_write( ICM20_PWR_MGMT_2, buff, 1);buff[0] = 0x00;icm20608_write( ICM20_LP_MODE_CFG, buff, 1);buff[0] = 0x00;icm20608_write( ICM20_FIFO_EN, buff, 1);
}/*linux driver 驱动接口: 实现对应的open/read/write等函数,填入file_operations结构体
*/
static ssize_t icm20608_drv_read(struct file *file, char __user *buf, size_t size, loff_t *offset)
{int err;signed int data[7];struct icm20608stru_value stru_dev;icm20608_readdata( &stru_dev );data[0] = stru_dev.gyro_x_adc;data[1] = stru_dev.gyro_y_adc;data[2] = stru_dev.gyro_z_adc;data[3] = stru_dev.accel_x_adc;data[4] = stru_dev.accel_y_adc;data[5] = stru_dev.accel_z_adc;data[6] = stru_dev.temp_adc;err = copy_to_user(buf, data, sizeof(data));return err;
}static int icm20608_drv_close(struct inode *node, struct file *file)
{printk(" %s line %d \r\n", __FUNCTION__, __LINE__);return 0;
}static int icm20608_drv_open(struct inode *inode, struct file *filp)
{icm20608_reginit();return 0;
}/* 定义driver的file_operations结构体
*/
static struct file_operations icm20608_fops = {.owner = THIS_MODULE,.read = icm20608_drv_read,.open = icm20608_drv_open,.release = icm20608_drv_close,
};/* 1. 从platform_device获得GPIO* 2. gpio=>irq* 3. request_irq*/
static int icm20608_probe( struct spi_device *spi )
{printk("icm20608 driver and device was matched!\r\n");/* initial spi port */spi->mode = SPI_MODE_0; /*MODE0,CPOL=0,CPHA=0*/spi_setup(spi);icm20608dev.spi = spi;/* register file_operations */icm20608dev.major = register_chrdev( 0, DEVICE_NAME, /* device name */&icm20608_fops); /* create the device class */icm20608dev.class = class_create(THIS_MODULE, "icm20608_class");if (IS_ERR(icm20608dev.class)) {printk("%s line %d\n", __FUNCTION__, __LINE__);unregister_chrdev( icm20608dev.major, DEVICE_NAME);return PTR_ERR( icm20608dev.class );}/* create device */device_create( icm20608dev.class, NULL, MKDEV( icm20608dev.major, 0 ), NULL, DEVICE_NAME); // device name return 0;
}static int icm20608_remove(struct spi_device *spi)
{printk("%s line %d\n", __FUNCTION__, __LINE__);device_destroy( icm20608dev.class, MKDEV( icm20608dev.major, 0));class_destroy(icm20608dev.class);unregister_chrdev(icm20608dev.major, DEVICE_NAME);return 0;
}static const struct of_device_id atk_dl6y2c_icm20608[] = {{ .compatible = "atk,icm20608" },{ },
};static const struct spi_device_id icm20608_id[] = {{ "xxxxyyy", (kernel_ulong_t)NULL },{ /* END OF LIST */ }
};/* 1. 定义platform_driver */
static struct spi_driver icm20608_driver = {.probe = icm20608_probe,.remove = icm20608_remove,.driver = {.name = "atk_icm20608",.of_match_table = atk_dl6y2c_icm20608,},.id_table = icm20608_id,
};/* 2. 入口函数: 注册driver
*/
static int __init icm20608_init(void)
{printk("%s line %d\n",__FUNCTION__, __LINE__);return spi_register_driver(&icm20608_driver);
}/* 3. 出口函数:卸载driver*/
static void __exit icm20608_exit(void)
{printk("%s line %d\n", __FUNCTION__, __LINE__);spi_unregister_driver(&icm20608_driver);
}/*4. 驱动入口和出口函数
*/
module_init(icm20608_init);
module_exit(icm20608_exit);MODULE_LICENSE("GPL");
MODULE_AUTHOR("tangmingfei2013@126.com");
3.2.3.1 驱动代码程序Makefile
PWD := $(shell pwd)KERNEL_DIR=/home/mftang/linux_workspace/study_atk_dl6y2c/kernel/atk-dl6u2c
ARCH=arm
CROSS_COMPILE=/home/ctools/gcc-linaro-4.9.4-arm-linux-gnueabihf/bin/arm-linux-gnueabihf-export ARCH CROSS_COMPILEobj-m:= drv_17_icm20608.oall:$(MAKE) -C $(KERNEL_DIR) M=$(PWD) modulesclean:rm -rf .*.cmd *.o *.mod.c *.ko .tmp_versions *.order *.symvers4 测试驱动安装
4.1 编译驱动程序
在服务器上编译驱动程序,执行make命令后,会生成的.ko,复制该文件到NFS的共享目中,方便在板卡中使用

4.2 在板卡上安装驱动
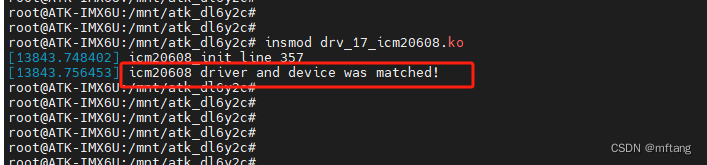
在板卡上执行:
insmod drv_17_icm20608.ko
可以看见打印如下信息,说明驱动程序已经安装到内核
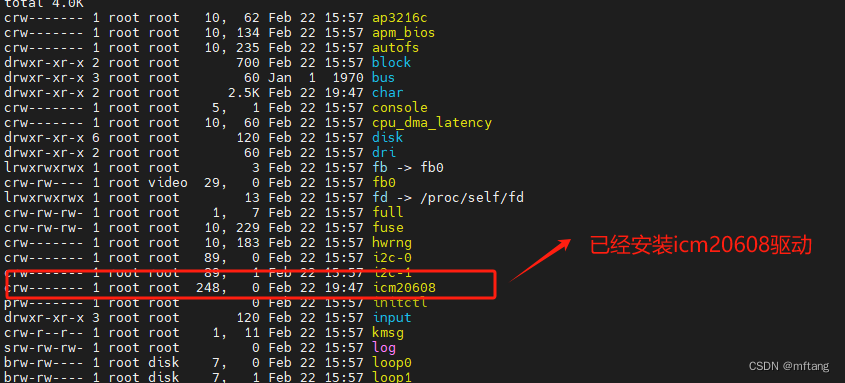
在dev目录下查看该设备驱动:
5 验证和测试
完成驱动程序编写后,并不能保证驱动程序是否能够正常工作,这时需要编程一个测试程序来验证其功能是否可靠。
5.1 编写测试程序
5.1.1 测试程序源代码
/***************************************************************
Copyright 2024-2029. All rights reserved.
文件名 : test_17_icm20608.c
作者 : tangmingfei2013@126.com
版本 : V1.0
描述 : 测试icm20608驱动程序
其他 : 无
日志 : 初版V1.0 2024/02/22
***************************************************************/
#include <sys/types.h>
#include <sys/stat.h>
#include <linux/types.h>
#include <linux/i2c-dev.h>
#include <linux/i2c.h>
#include <sys/ioctl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <fcntl.h>
#include <stdlib.h>
#include <linux/fs.h>
#include <unistd.h>
#include <errno.h>
#include <assert.h>
#include <string.h>
#include <time.h>#define DEV_FILE "/dev/icm20608"struct icm20608stru_value{signed int gyro_x_adc; /* 陀螺仪X轴原始值 */signed int gyro_y_adc; /* 陀螺仪Y轴原始值 */signed int gyro_z_adc; /* 陀螺仪Z轴原始值 */signed int accel_x_adc; /* 加速度计X轴原始值 */signed int accel_y_adc; /* 加速度计Y轴原始值 */signed int accel_z_adc; /* 加速度计Z轴原始值 */signed int temp_adc; /* 温度原始值 */
};int main(void)
{int count = 0;int fd, ret;unsigned char databuf[7];struct icm20608stru_value stru_value;float gyro_x_act, gyro_y_act, gyro_z_act;float accel_x_act, accel_y_act, accel_z_act;float temp_act;fd = open(DEV_FILE, O_RDWR);if (fd == -1){printf("can not open file: %s \n", DEV_FILE);return -1;}while (count < 10000 ) {ret = read(fd, databuf, sizeof(databuf));if(ret == 0) {stru_value.gyro_x_adc = databuf[0];stru_value.gyro_y_adc = databuf[1];stru_value.gyro_z_adc = databuf[2];stru_value.accel_x_adc = databuf[3];stru_value.accel_y_adc = databuf[4];stru_value.accel_z_adc = databuf[5];stru_value.temp_adc = databuf[6];/* 计算实际值 */gyro_x_act = (float)(stru_value.gyro_x_adc) / 16.4;gyro_y_act = (float)(stru_value.gyro_y_adc) / 16.4;gyro_z_act = (float)(stru_value.gyro_z_adc) / 16.4;accel_x_act = (float)(stru_value.accel_x_adc) / 2048;accel_y_act = (float)(stru_value.accel_y_adc) / 2048;accel_z_act = (float)(stru_value.accel_z_adc) / 2048;temp_act = ((float)(stru_value.temp_adc) - 25 ) / 326.8 + 25;printf("\r\n %04d count value:\r\n", count);printf("gx = %d, gy = %d, gz = %d\r\n", stru_value.gyro_x_adc,stru_value.gyro_y_adc, stru_value.gyro_z_adc);printf("ax = %d, ay = %d, az = %d\r\n", stru_value.accel_x_adc, stru_value.accel_y_adc, stru_value.accel_z_adc);printf("temp = %d\r\n", stru_value.temp_adc);printf(" %04d user value: ", count);printf("gx = %.2f°/S, gy = %.2f°/S, gz = %.2f°/S\r\n", gyro_x_act, gyro_y_act, gyro_z_act);printf("ax = %.2fg, ay = %.2fg, az = %.2fg\r\n", accel_x_act, accel_y_act, accel_z_act);printf("temp = %.2f°C\r\n", temp_act);}usleep(100000); /*100ms */count++;}close(fd);return 0;
}
5.1.2 测试程序Makefile
CFLAGS= -Wall -O2
CC=/home/ctools/gcc-linaro-4.9.4-arm-linux-gnueabihf/bin/arm-linux-gnueabihf-gcc
STRIP=/home/ctools/gcc-linaro-4.9.4-arm-linux-gnueabihf/bin/arm-linux-gnueabihf-striptest_17_icm20608: test_17_icm20608.o$(CC) $(CFLAGS) -o test_17_icm20608 test_17_icm20608.o$(STRIP) -s test_17_icm20608clean:rm -f test_17_icm20608 test_17_icm20608.o5.2 运行测试代码
编译测试代码,将生成的可执行文件共享在NF目录中,方便在板卡中执行程序
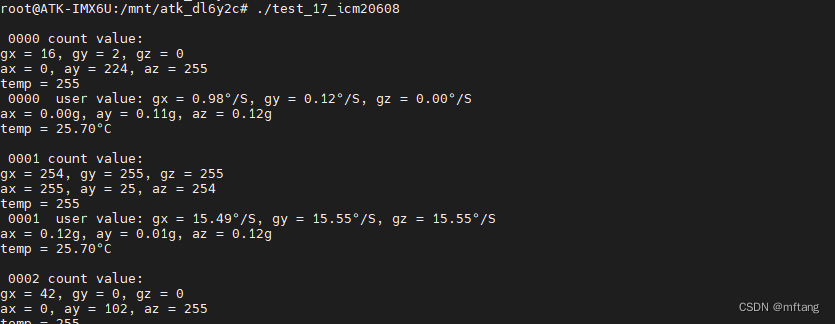
转动板卡,观察sensor的数据变化
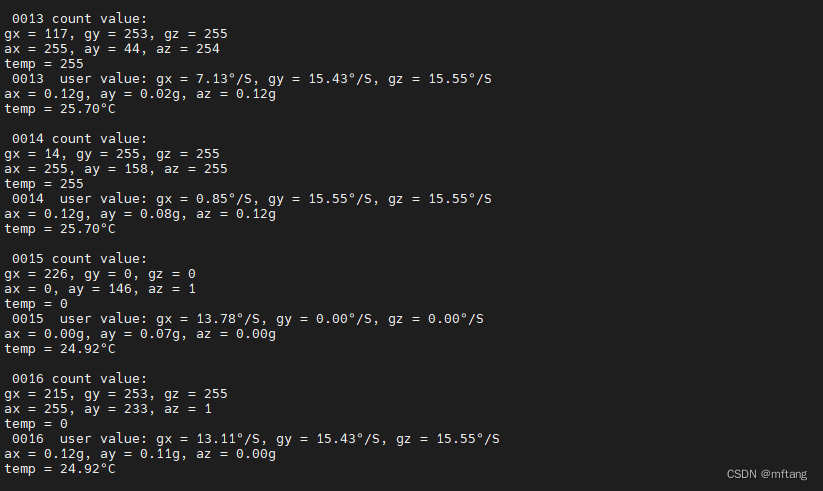
5.3 结论
通过运行测试程序,App调用驱动程序,能正确的从sensor中读取数据