江苏省城乡和建设厅网站做网站推广好做吗
运动控制器是数控机床、高端机器人等自动化设备控制系统的核心。为保证控制器的实用性、实时性和稳定 性,提出一种以 STM32 为主控制器、FPGA 为辅助控制器的多轴运动控制器设计方案。给出了运动控制器的硬件电路设计, 将 S 形加减速算法融入运动控制器,提高了控制精度,可有效避免过冲、振荡等现象的发生。在三维点胶机平台上对运动 控制器的性能进行了测试,结果表明: 点胶机各轴能按照设定的轨迹运动,运行平稳且实时性高,具备良好的应用前景。
运动控制器性能的好坏直接对自动化系统整体性能的 发 挥 起 决 定 性 作 用[1-2]。克 莱 斯 勒、西 门 子、 FANUC、MAZAK 占据我国 90%左右的工业用运动控 制器市场。随着运动控制技术的发展,FPGA、ARM、 DSP、专用芯片等逐渐成为运动控制器的核心部件, 并日益朝着开放式方向发展[3-4]。以单片机为核心的运动控制器运算速度慢、控制精度低,一般用于低 速、运动轨迹简单的场合; 以专用芯片为核心的运动 控制器只是发出脉冲信号,无法接收反馈信号,处于开环状态,不能满足多轴联动和高速、高精度的轨迹 插补要求[5-7]。基于 PC 的以 FPGA、ARM、DSP 为核心处理器的运动控制器,如固高科技 GH-800,数据处理速度快、实时性高,可完成多轴协同控制、复杂轨迹运动和加减速。 以 STM32 为主控器、FPGA 为辅助控制器,搭建硬件平台及进行外围电路设计。利用 STM32 丰富的外设资源,完成运动轨迹规划、人机交互、数据存储、数据交互等控制; 利用 FPGA 丰富的逻辑资源,实现各个运动轴脉冲并行输出、输入信号和原点位置的检测、输出开关量控制等功能。控制器设计中引入S 形加减速算法,可有效避免实际运行过程中的过冲、失步及振荡等现象。该运动控制器硬件结构简单,在保证精度、实时性、可靠性的前提下,能有效缩短研发周期。 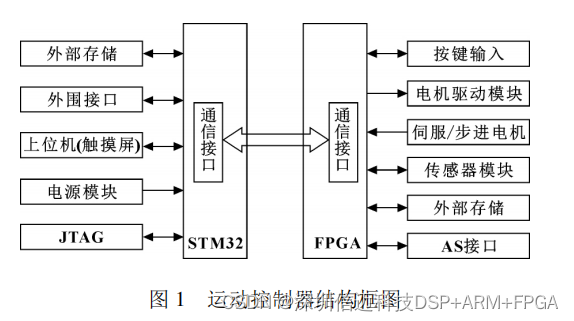
1 运动控制器结构
运动控制器采用 STM32+FPGA 的硬件结构形式,主控制芯片选用 ST 公司的 STM32F4xx,辅助控制芯片选择 Altera 公司的 EP2 系列芯片。主要模块包括数据存储 模 块、外部输入检测模块、电 机 驱 动 模块、接口模块、人机交互模块等,其结构框图如图1 所示。
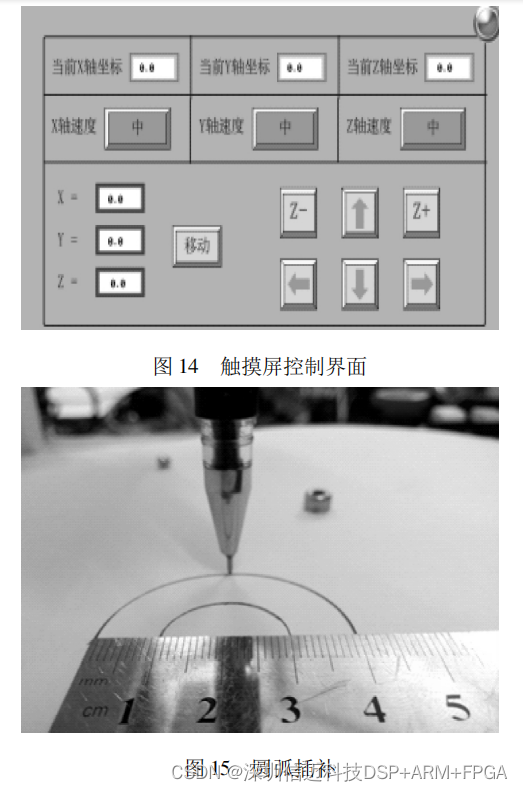
主控制器以 STM32 为核心,将电机运行过程中的数据存入外部存储器,使用触摸屏和按键相结合的方式实现人机交互; 触摸屏作为上位机,通过串口与 STM32 通信,可对整个系统进行调试,按键通过 I/O 接口与 FPGA 相连。主控制器处理外部数据存储器的插补信息后,经总线发送给 FPGA,FPGA 接到控制指令或插补数据后进行插补运算,然后通过隔离电路将信号发送到各个电机驱动器,对各轴电机进行驱动,完成目标运动轨迹.
STM32 与 FPGA 的通信接口
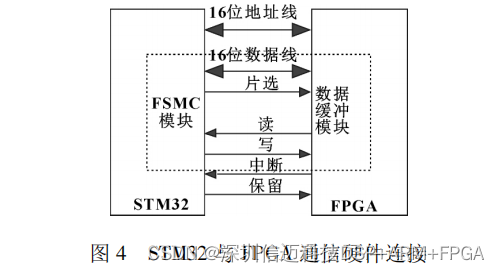
STM32 与 FPGA 之间可以通过可变静态存储控制器 ( Flexible Static Memory Controller,FSMC) 进行通信,如图 4 所 示。根 据 FSMC 的 功 能 特 性,设 定STM32 的地址线和数据线宽度为 16 位,STM32 片选选中 FPGA 进行数据读写,FPGA 通过中断反馈数据处理情况。
STM32 芯片的配置
STM32 芯片外围硬件看门狗能有效监控 CPU 的运行情况。STM32 需要配置 2 个外部晶振: 一个频率为 32. 768 kHz,主要给芯片内部时钟部件提供低速、 高精度的时钟; 另一个频率为 25 MHz,产生主时钟,通过分频、倍频模块后供给各个模块[4,6]。
2. 2
FPGA 模块电路设计
FPGA 主要负责插补算法信息的处理、脉冲信号的输出、开关量的输入和输出、接收编码器的差分信 号等。
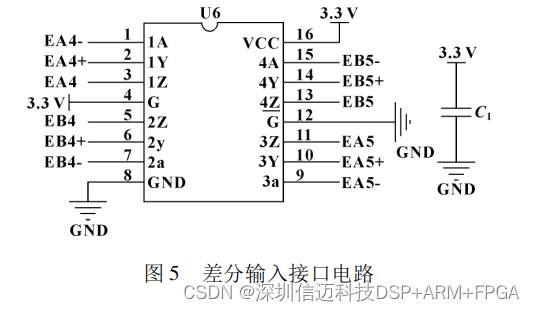
( 1) 差分输入接口电路
U6 为四路差动信号接收器,用来接收编码器输出的差分信号,将电机的位置信息反馈给 FPGA。接口电路如图 5 所示

3 运动控制器软件设计
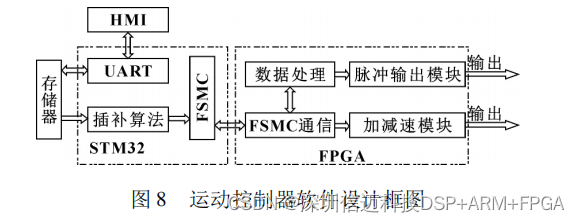
通过触摸屏 ( HMI) 发送指令给 STM32,STM32 接收到指令后通过动态链表的形式将指令存储于外部存储器; 实时读取存储器,将运动轴的位置信息、速度信息返回给触摸屏显示,同时将指令信息和插补算法数据,由 FSMC 传到 FPGA 处理; 最后由脉冲发生器产生脉冲指令给电机驱动器,驱动电机转动。运动控制器软件设计框图如图 8 所示。
4
S 形速度规划算法的实现
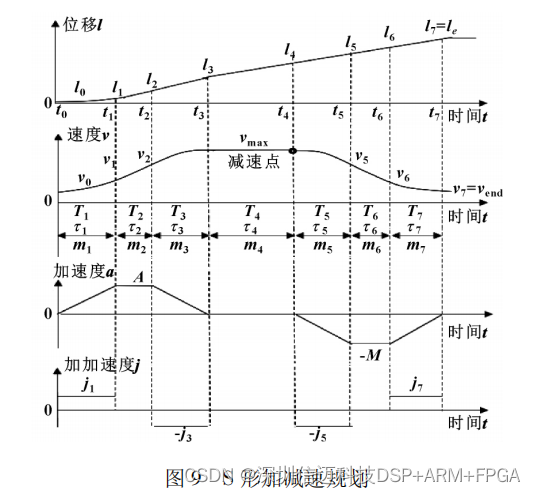
S 形加减速可充分发挥电机性能,因其在加减速阶段速度曲线呈 S 形而得名。令加速度的导数为常 数,改变其 大 小,可最大限度减小系统冲击[10-11]。 整个加减速过程由 7 个部分构成[12-13],如图 9 所示。 图中: l 为运动的位移,v 为速度,a 为加速度,j 为
加加速度,A 表示匀加速阶段的加速度值,M 表示匀减速阶段的加速度值,Ti ( i = 1,2,3,......,7) 为各阶段的运行时间,τi ( i = 1,2,3,
......,7) 为以各个起点作为 0 点的时刻,ti ( i = 1,2,3,
......,7) 为各个过渡点时刻。实际应用时,m1 ~ m4 的各阶段
都需要判断减速点,一般情况下,从 0 加速到最大速度和从最大速度减速到 0 所用的时间相同,即 T1 = T3、T5 = T7。
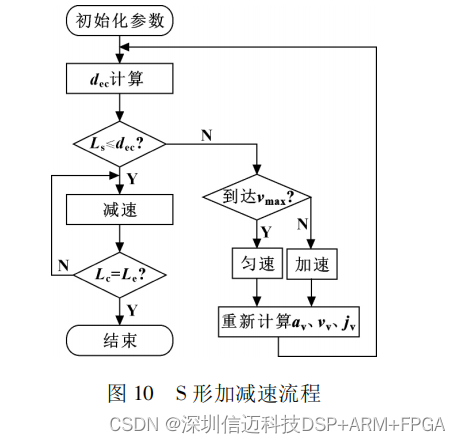
结合图 10 所示的流程,算法实现过程如下:
步骤 1,初始化相关的参数,包括初始速度、目标速度 ( 最大运行速度) 、加加速度 j、最大加速度 A。
步骤 2,计算减速距离 dec,将 dec与剩余距离 Ls 比较,其中 Ls = Le -Lc,Le 表示指定目标位置值、Lc 表示当前位置值。
步骤 3,若 Ls > dec 则减速,否则加速或者匀 速 ( 此时如果到达最大速度则匀速,未到达则加速) 。
步骤 4,根据步骤 3 的判断,重新计算 av、vv、jv 并输出。
步骤 5,当 Lc = Le 时,到达终点,运动停止,否则重复步骤 2~ 5。
6 结束语
本文作者提出了一种以 STM32 为主控制器、FPGA 为辅助控制器的运动控制器设计方案,完成了控制器硬件平台及外围电路设计,将 S 形加减速控制算法融入到运动控制器中,有效避免了运动时由于速度突变引起的过冲、抖动等现象,提高了控制精度。对运动控制器进行测试,结果表明: 以 STM32+FPGA 为硬件架构的运动控制器实时性好、可靠性高,能满足工业运动控制的要求。
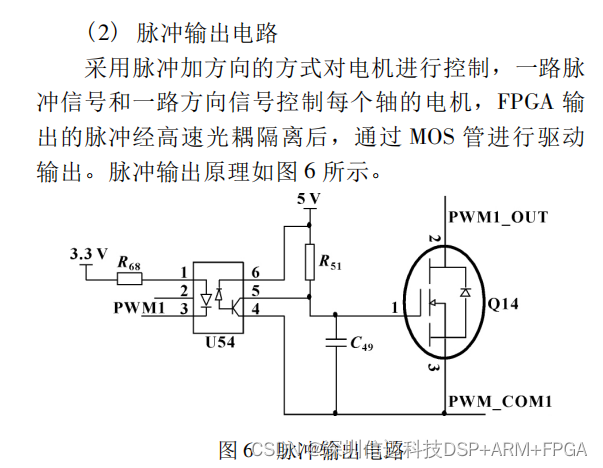
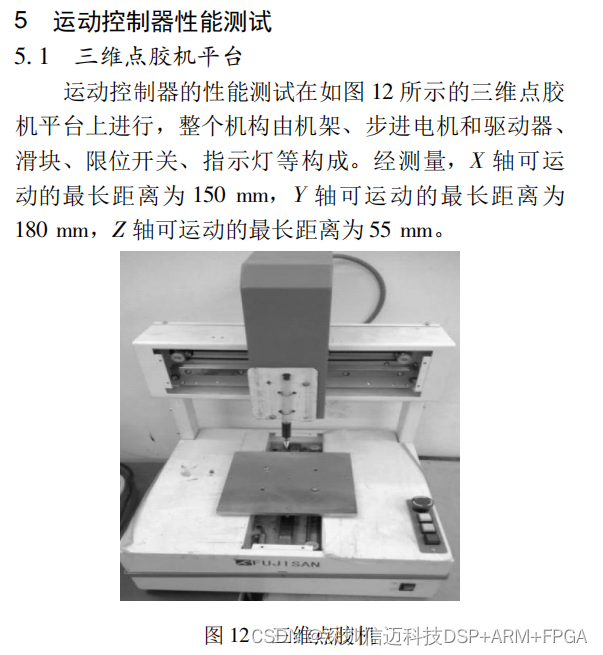
信迈支持STM+FPGA运动控制器、ethercat总线定制。