地方性小网站的建设网站推广软件免费观看
【UR机械臂CB3 网络课程 】
- 1. 前言
- 2. 概览:特色与术语
- 2.1 机器人组成
- 2.1.1控制柜
- 2.1.2 UR 机器人手臂
- 2.2 接通机器人电源
- 2.3 移动机械臂
- 3. 机器人如何工作
- 3.1 选择臂端工具
- 3.2 输入有关臂端工具的信息
- 3.3 连接外部装置
- 3.4 机器人编程
- 4. 设置工具
- 4.1 末端执行器配置
- 4.2 工具中心点
- 4.3 设置有效载荷
- 4.4 设置重心位置
1. 前言
此部分是我在UR官网学习UR机械臂的笔记,非常生动的交互。在这里,您可以找到免费的互动式网络课程模块。
官网地址:https://academy.universal-robots.com/cn/%E5%85%8D%E8%B4%B9%E7%BD%91%E7%BB%9C%E8%AF%BE%E7%A8%8B/
- 进入UR官网,可以点击右上角先注册账号,方便后期顺利浏览和学习。😊😊😊

- 我学习的模块比较老旧,采用旧款CB3网络课程学习,新版的可以采用e-Series网络课程,按需选择

- 进入之后一共有9个模块学习
1.概览:特色与术语
2.机器人如何工作
3.设置工具
4.创建程序
5.与外部设备互动
6.安全设置
7.特征坐标
8.包装
9.程序流程
下面就一一进入学习啦🙌🙌🙌
2. 概览:特色与术语
本模块为您提供了一份关于机器人、用户界面、I/O和各功能的简短介绍,大约需要9分钟。

启动模块,模块简介,此部分会介绍机器人部件的名称及功能,如何接通机器人电源,拖动机械臂
2.1 机器人组成
机器人大体分为控制箱、示教器和机械臂本体
2.1.1控制柜
本章说明了如何将设备连接到控制箱内的 I/O。此 I/O 极其灵活,可用于多种不同的设备,其
中包括气动继电器、PLC 和紧急停止按钮。下图显示了控制箱内部的电气接口布局。
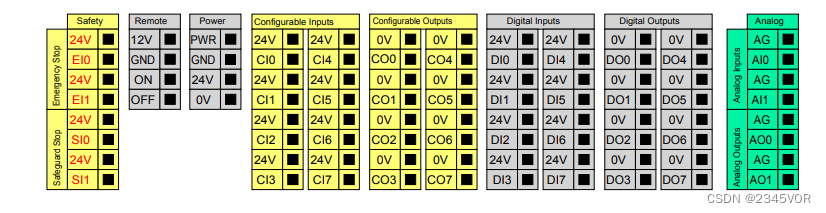
| 文本 | 功能 |
|---|---|
| 黄色,含红色文本 | 专用安全信号 |
| 黄色,含黑色文本 | 可进行安全配置 |
| 灰色,含黑色文本 | 通用数字 I/O |
| 绿色,含黑色文本 | 通用模拟 I/O |
具体介绍见:1.9.3. 控制器 I/O
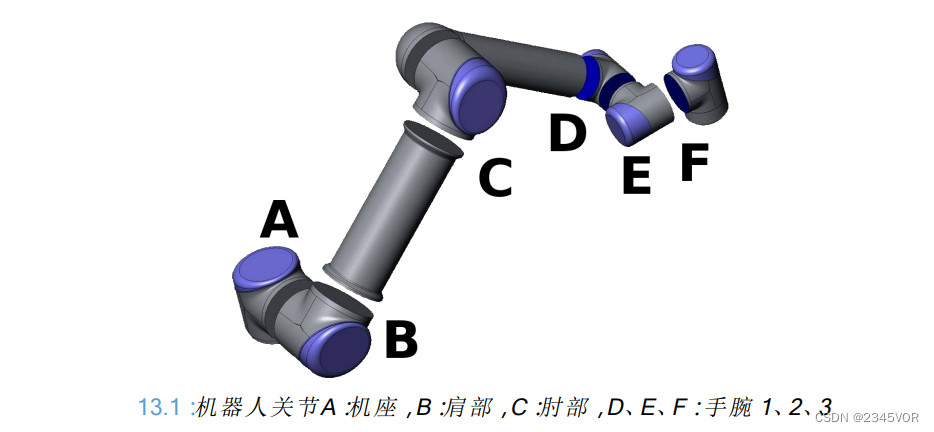
2.1.2 UR 机器人手臂
UR 机器人手臂由挤压铝管和关节组成。这些关节及其常用名称如图 13.1 所示。机座是机器
人的安装位置,机器人的另一端( 手腕 3) 与机器人的工具相连。通过协调每一个关节的活动,
除了基座正上方及正下方的区域以外,机器人可以自由地移动工具。
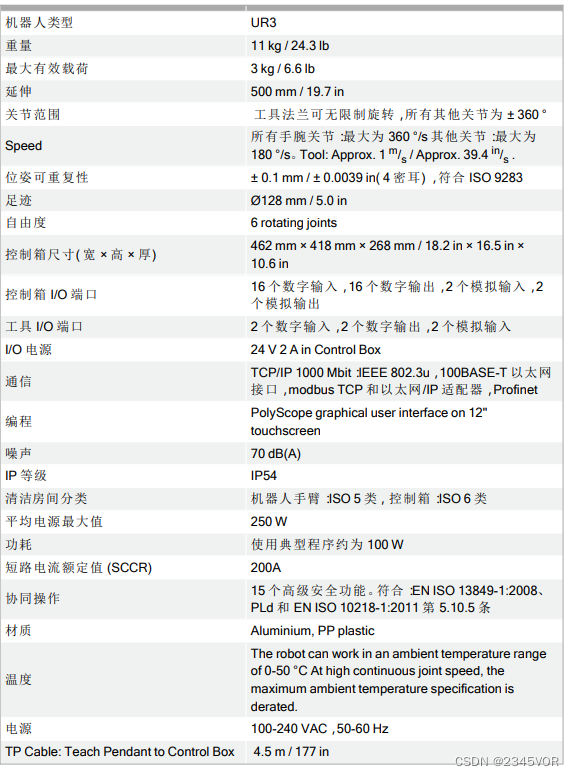
UR3技术规格如下
2.2 接通机器人电源
此部分直接插座接通AC220V,控制柜会给其他设备供电。🤷♂️🤷♂️🤷♂️
所有数字 I/O 的通用规范
本节阐述了控制箱的下列 24V 数字 I/O 的电气规范。
• 安全 I/O。
• 可配置 I/O。
• 通用 I/O。
按照电气规范安装 UR 机器人是非常重要的,这三类不同的输入都要做到这一点。
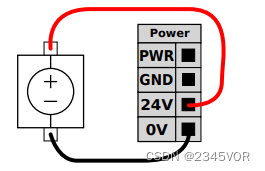
数字 I/O 既可由内部 24V 电源供电,也可通过配置电源接线盒由外部电源供电。终端盒由四
个终端组成。上面两个( PWR 和 GND) 为 24V,内部的 24V 电源接地。接线盒下部的两个端子
( 24V 和 0V) 是为 I/O 供电的 24V 输入。默认配置为使用内部电源,请参见下图。
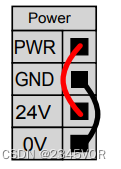
如果需要更大的电流,可如下图所示连接外部电源。
2.3 移动机械臂
科普一下:
坐标系是在机器人或其他空间设置的位置指标系统,以确定机器人的位置和姿势。
工业机器人上的坐标系有六种:大地坐标系(WorldCordinatesystem)、基坐标系(Basecordinatesystem)、关节坐标系(Jointcordinatesystem)、工具坐标系(Torkordinatesystem)、工件坐标系(Workobjectcordinatestem)和用户坐标系。
1.地球坐标系。
地球(世界)坐标系是固定在空间上的标准直角坐标系,固定在事先确定的位置。基于坐标系设置用户坐标系。
2.基坐标系。
基坐标系由机器人底座基点和坐标位置组成,是机器人其他坐标系的基础。
3.关节坐标系。
关节坐标系是设置在机器人关节中的坐标系,是每个轴相对于其原点位置的绝对角度。
4.工具坐标系。
工具坐标系用于确定工具的位置,由工具中心点(TCP)和坐标位置组成。必须提前设置工具坐标系。默认工具坐标系将在没有定义的情况下取代坐标系。
工具坐标系可以通过N(N>=4)点法确定:机器人TCP可以通过N种不同的姿势与指定点接触获得多组解,通过计算获得当前TCP与工具安装法兰中心点(tol0)的相应位置,坐标系方向与tool0一致。
5.工件坐标系。
工件坐标系用于确定工件的位置,由工件原点和坐标位置组成。工件坐标系可采用三种方法确定:点X1与点X2连接形成X轴,点Y1向X轴的垂直线为Y轴,Z轴方向由右手定则确定。
6.用户坐标系。
用户坐标系是用户定制每个工作空间的直角坐标系,用于位置寄存器的教学和执行、位置补偿指令的执行等。大地坐标系将在没有定义的情况下取代坐标系。
一共有三种方法,第一种是示教器的关节坐标系和关节坐标系六组运动,第二种自由驱动按钮人为拖动,最后一种是通讯的方法(modbus,tcp)

上面是示教器的关节坐标系和关节坐标系六组运动

上面是自由驱动按钮人为拖动,位置在示教器背面的黑色按钮,一直按住按钮即可人为拖动到适当范围的适当位置。
当碰到人体或阻力过大导致机械臂的保护性停止

3. 机器人如何工作
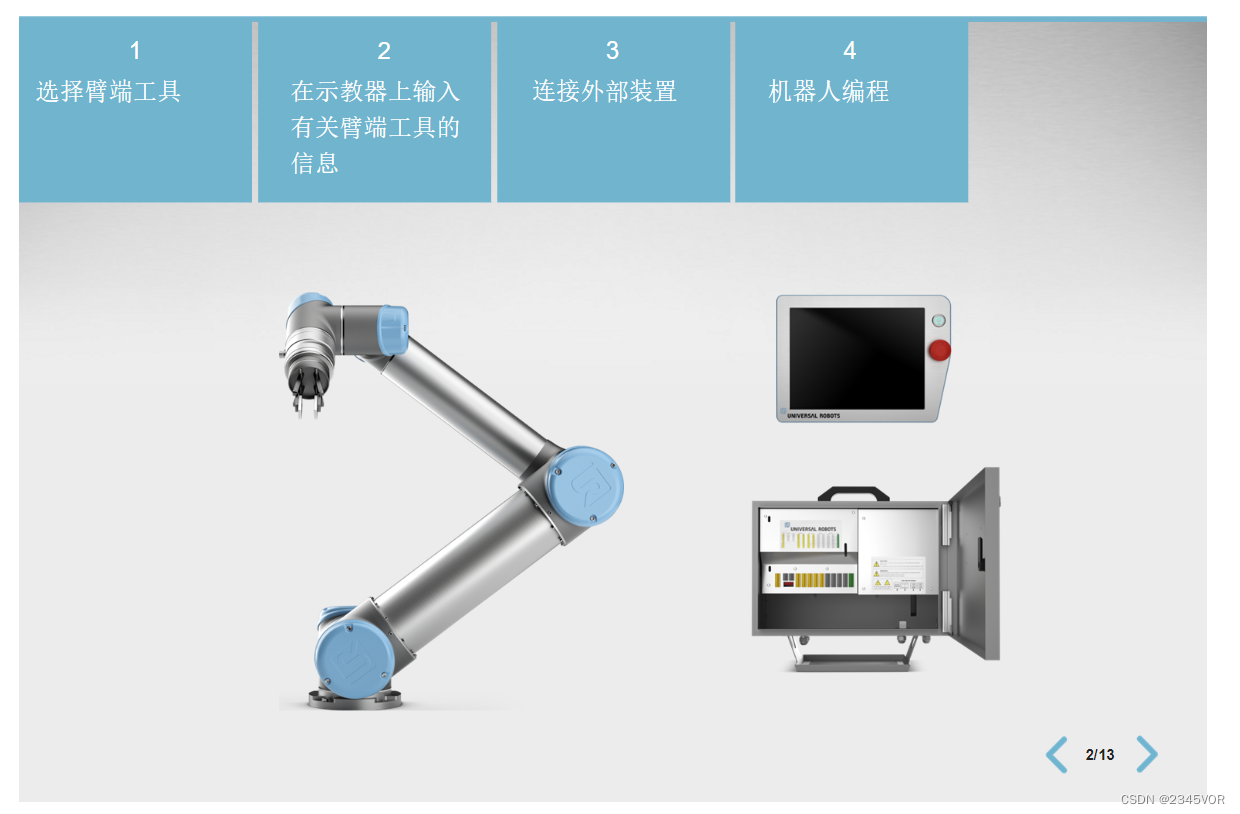
在本模块中,您将通过添加末端执行器和传感器让机器人做好抓放任务准备工作。

首先选择臂端工具,然后在示教器上输入有关臂端工具的信息,接着连接外部装置,最后为机器人编程。😘😘😘
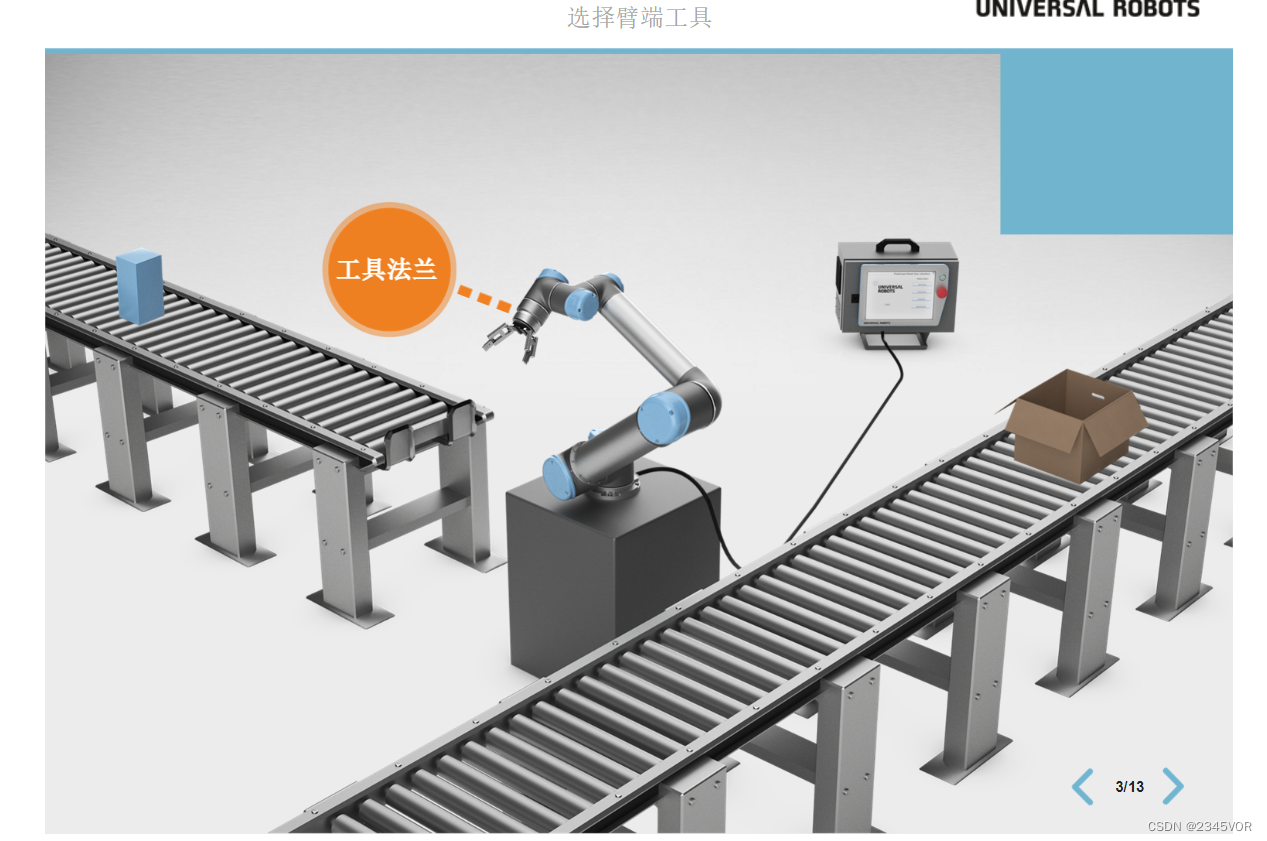
3.1 选择臂端工具
UR机械臂搬运工件,选择合适工具安装在手腕的末端工具法兰上
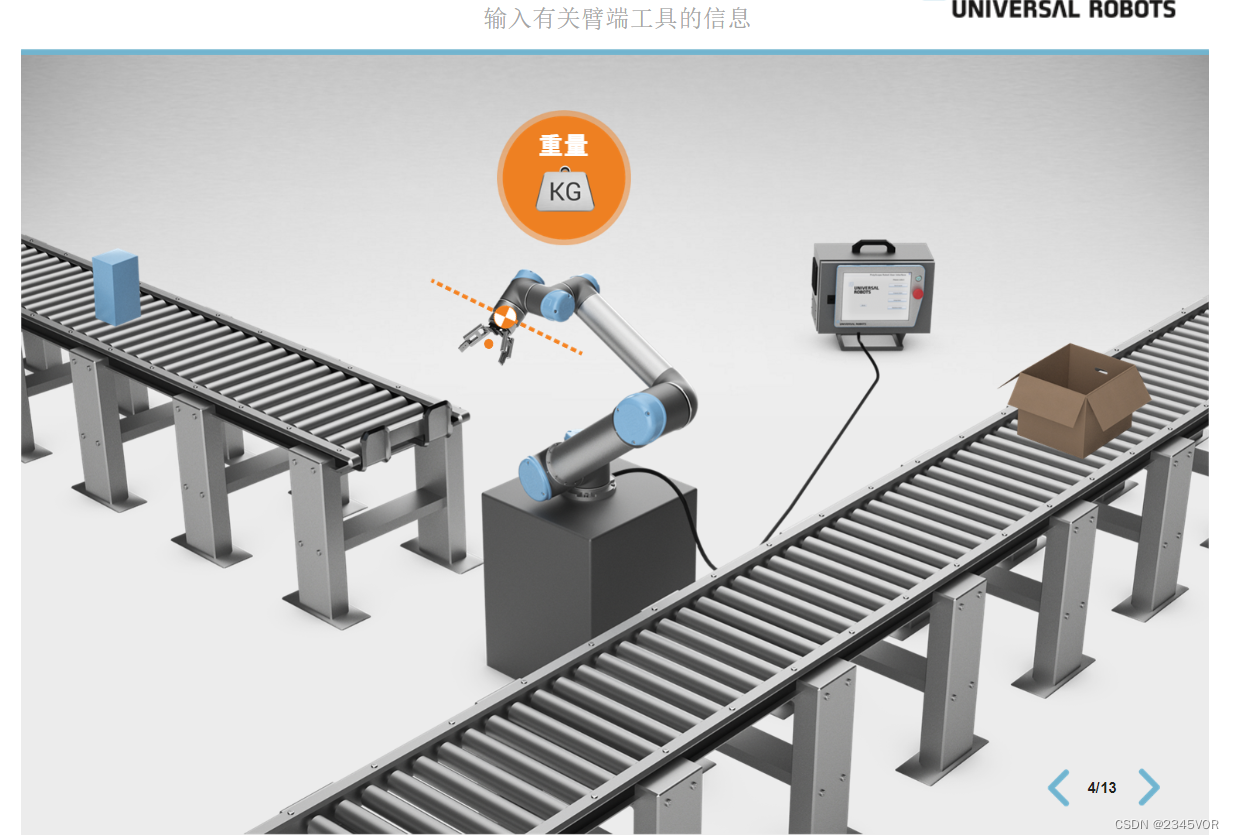
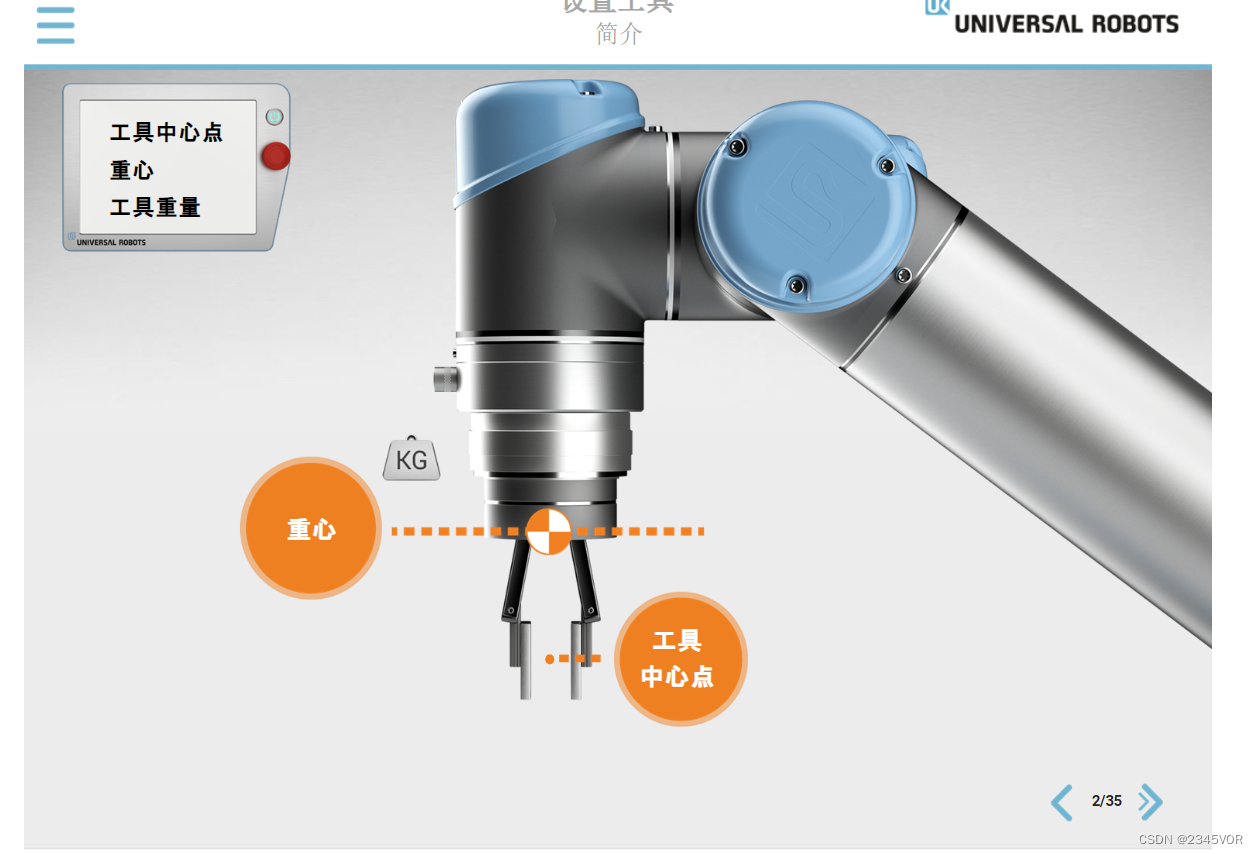
3.2 输入有关臂端工具的信息
工具中心点,工具重心,工具重量,有效载荷
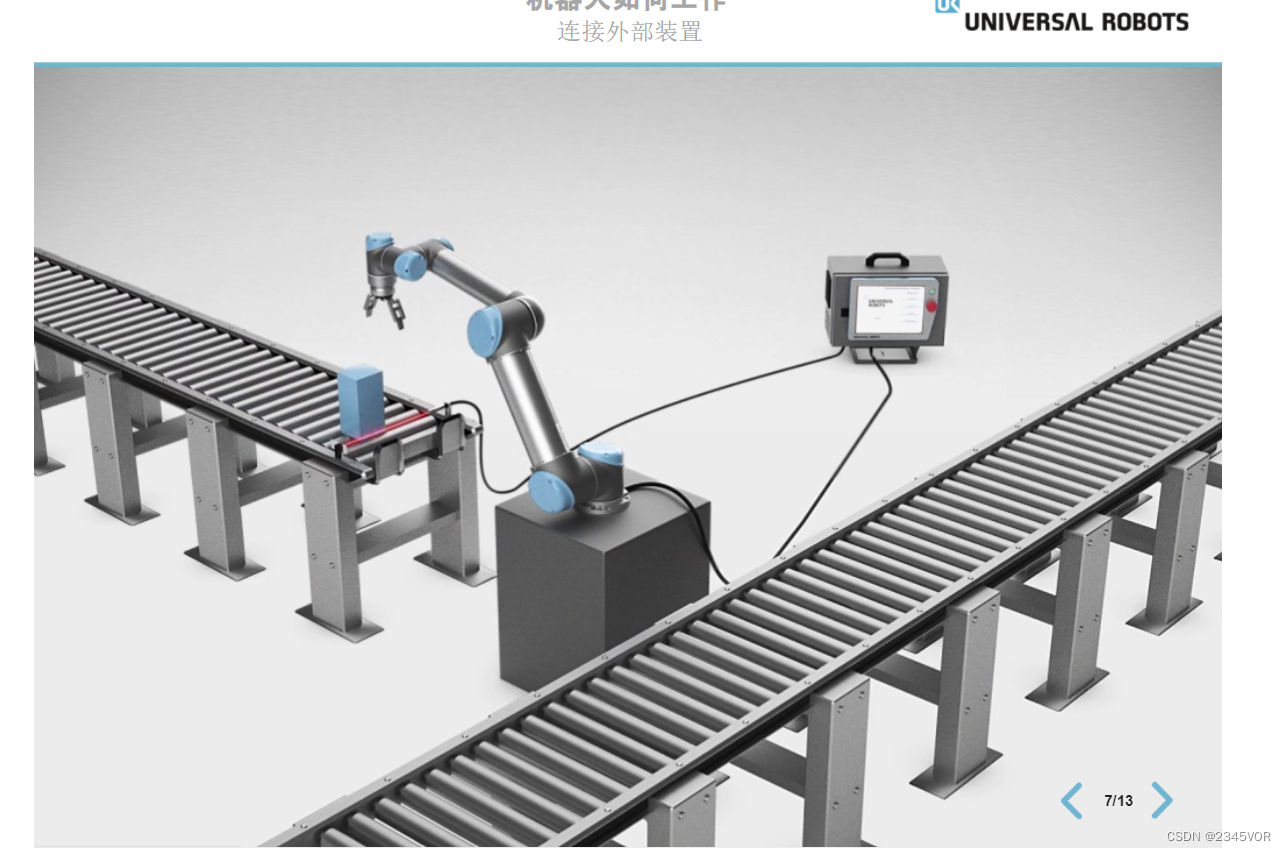
3.3 连接外部装置
传感器检查工件位置信息,提示与机器人的相对位置状态,衔接连续性搬运动作。

3.4 机器人编程
程序结构包括运动和信号处理
移动至左侧滚轮皮带
在左侧滚轮皮带处,等待传感器的输入
拿起工件
移动至右侧滚轮皮带
在右侧滚轮皮带处,等待传感器的输入
放置工件


4. 设置工具
学习如何查找及配置工具中心点、如何教授工具方向,以及如何确定与输入重心和有效负载。
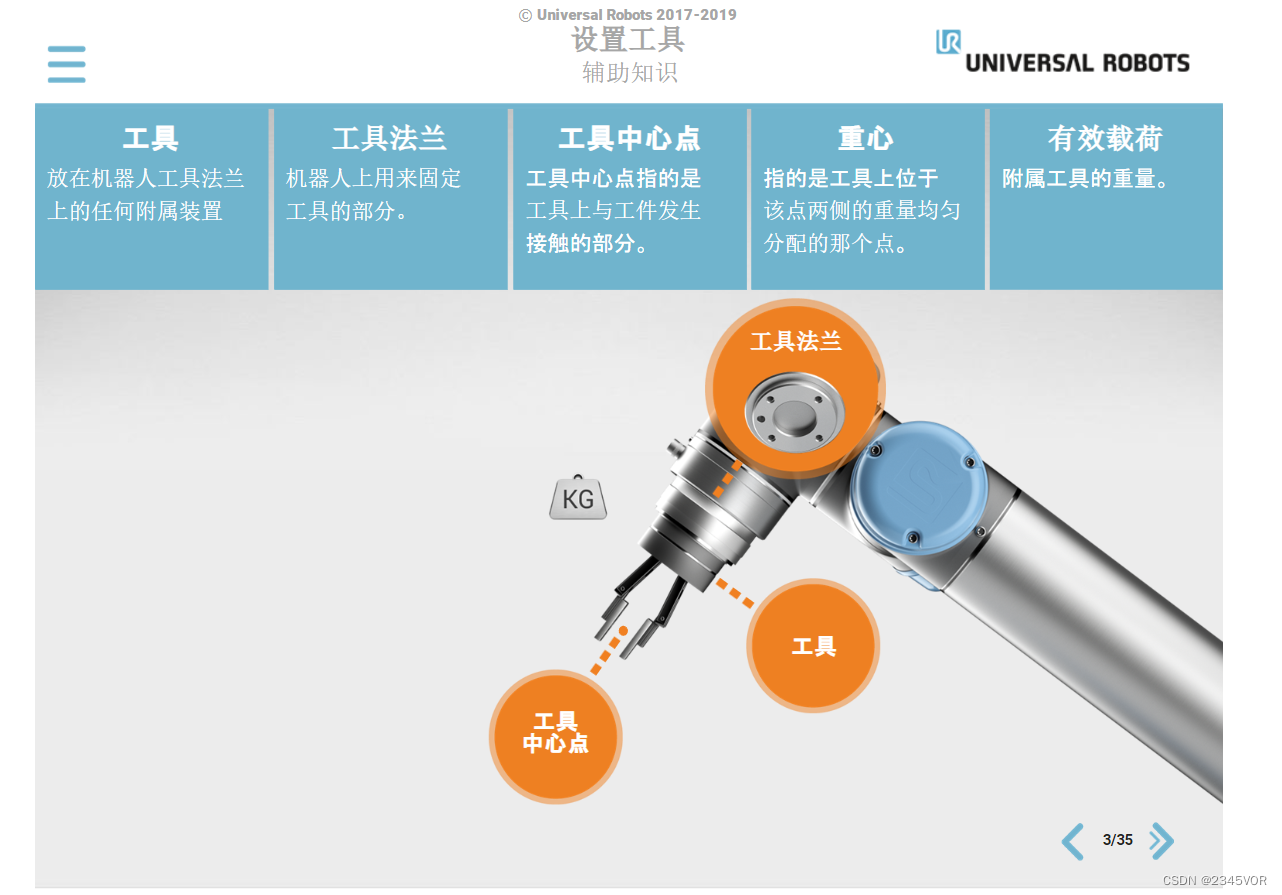
4.1 末端执行器配置
末端执行器有夹爪或点胶机
| 名称 | 定义 |
|---|---|
| 工具 | 放在机器人工具法兰上的任何附属装置 |
| 工具法兰 | 机器人上用来固定工具的部分。 |
| 工具中心点 | 工具中心点指的是工具上与工件发生 接触的部分。 |
| 重心 | 指的是工具上位于该点两侧的重量均匀分配的那个点。 |
| 有效载荷 | 附属工具的重量。 |
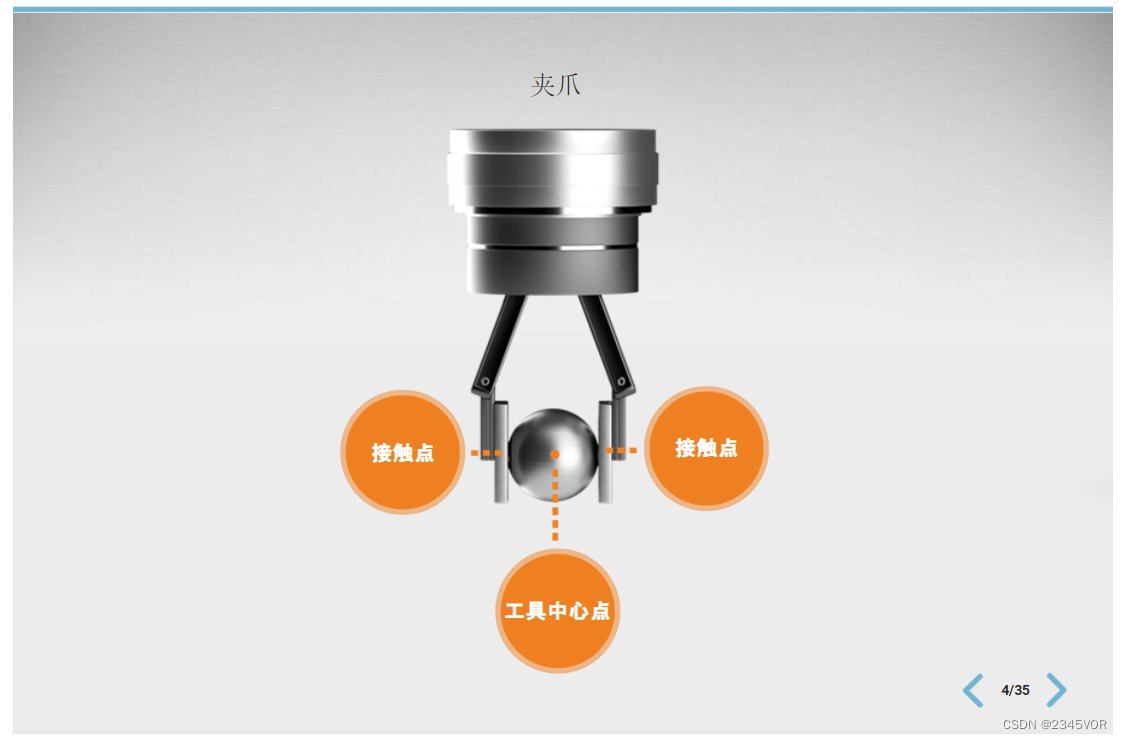
4.2 工具中心点
夹爪一般为量接触的点或面的中点,点胶机的喷嘴
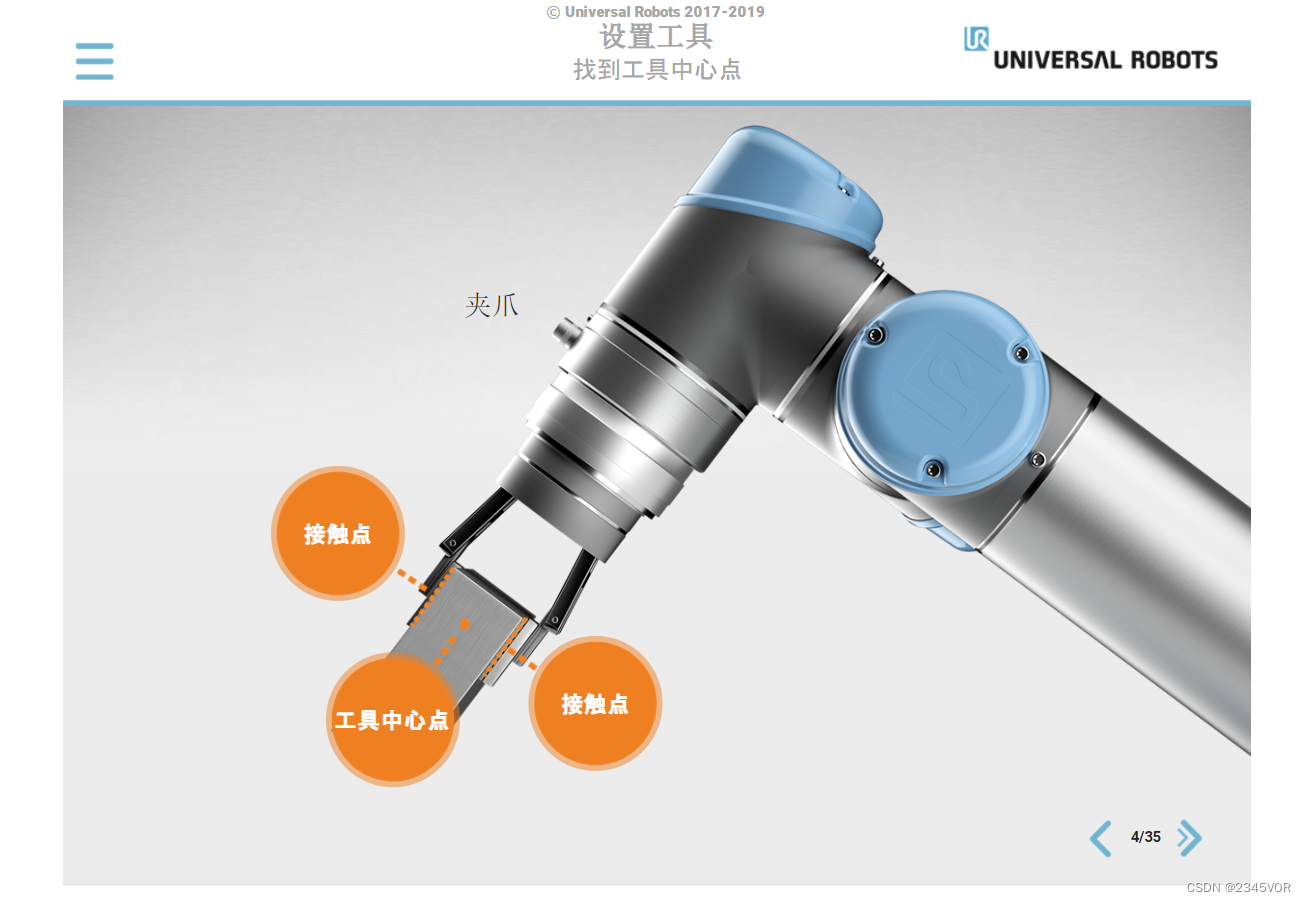
设置工具中心点

先清空,然后输入Z位置140,保存配置

4.3 设置有效载荷

先清空,然后输入有效载荷0.6,保存配置

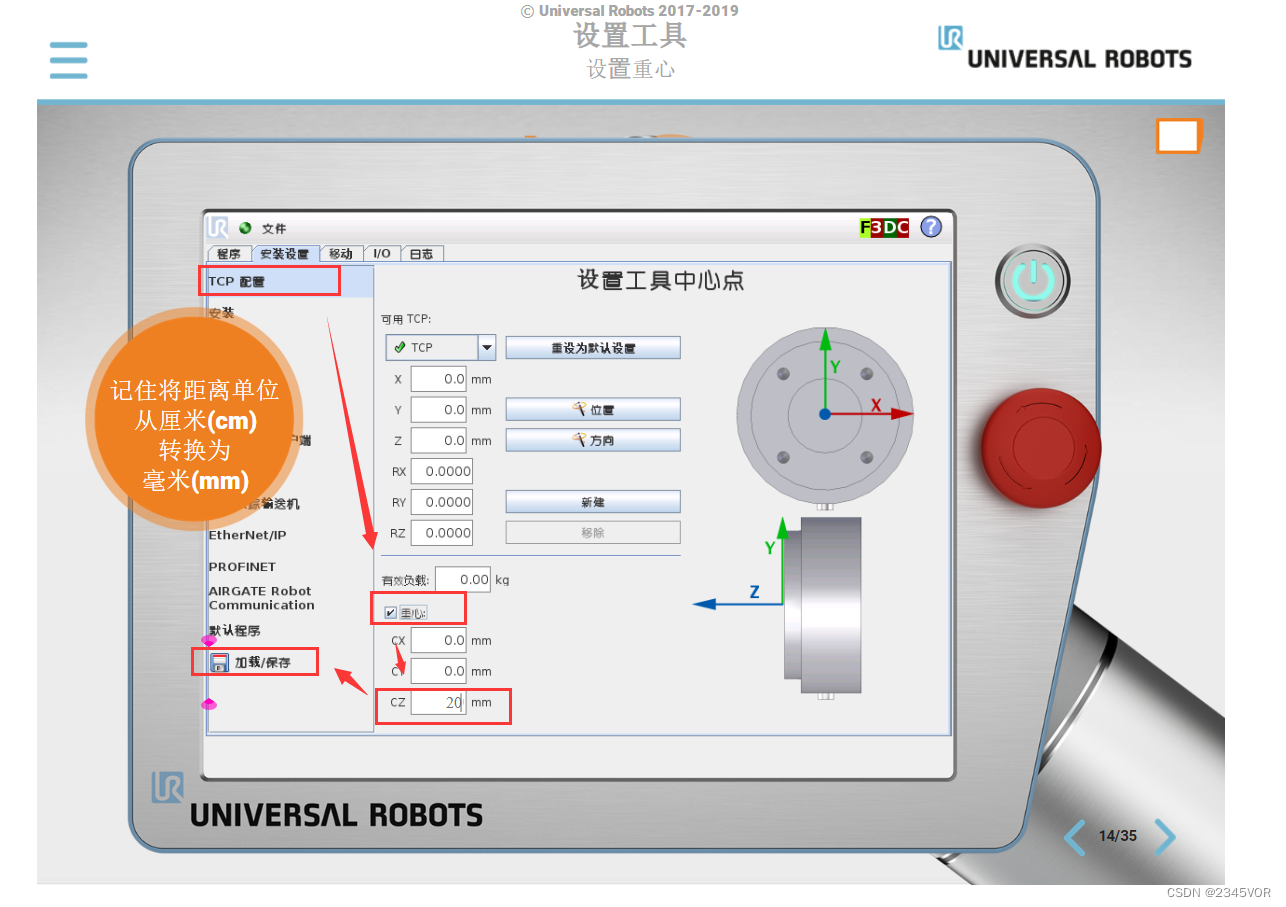
4.4 设置重心位置
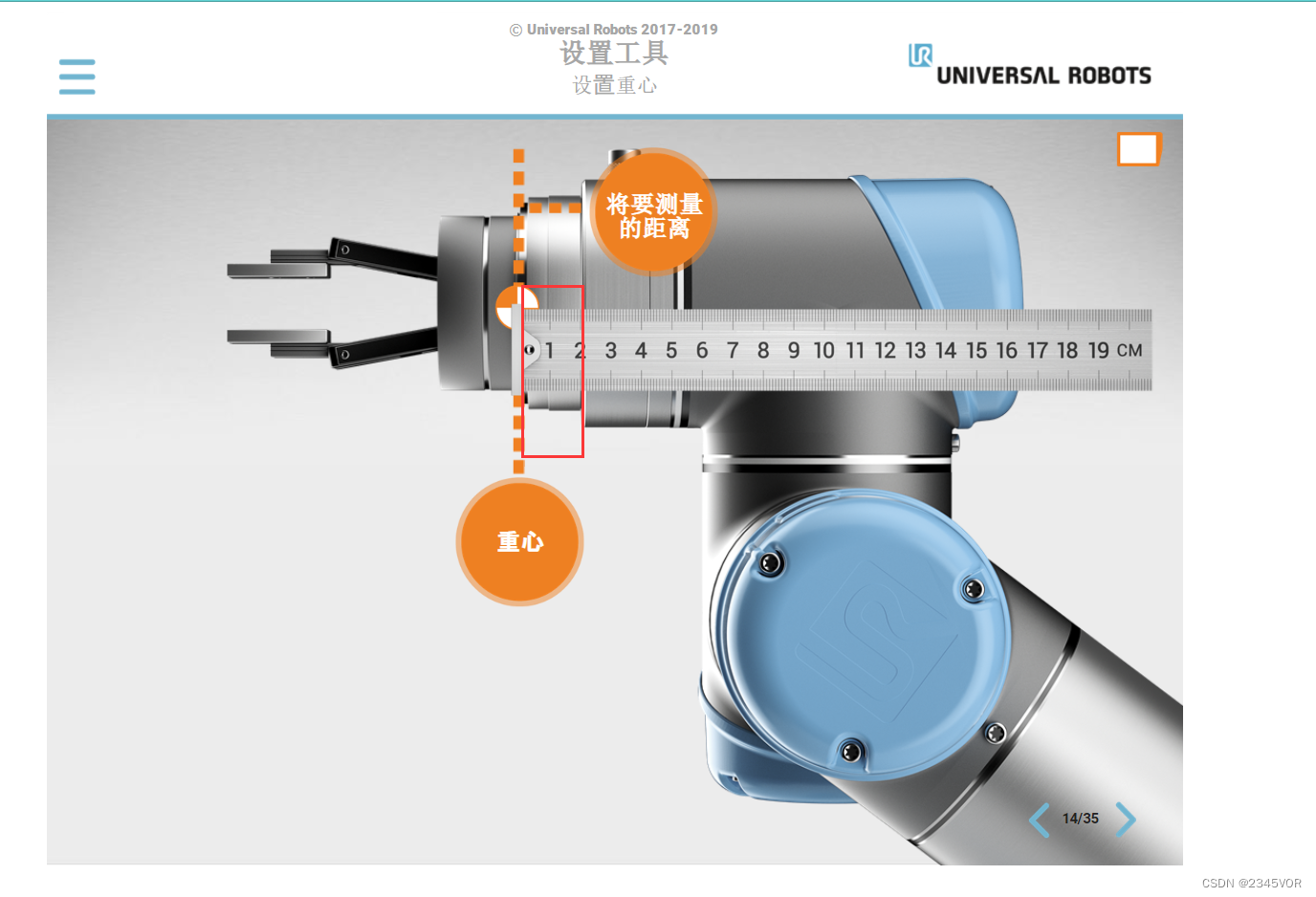
勾选复选框,先清空CZ,然后输入20,保存配置




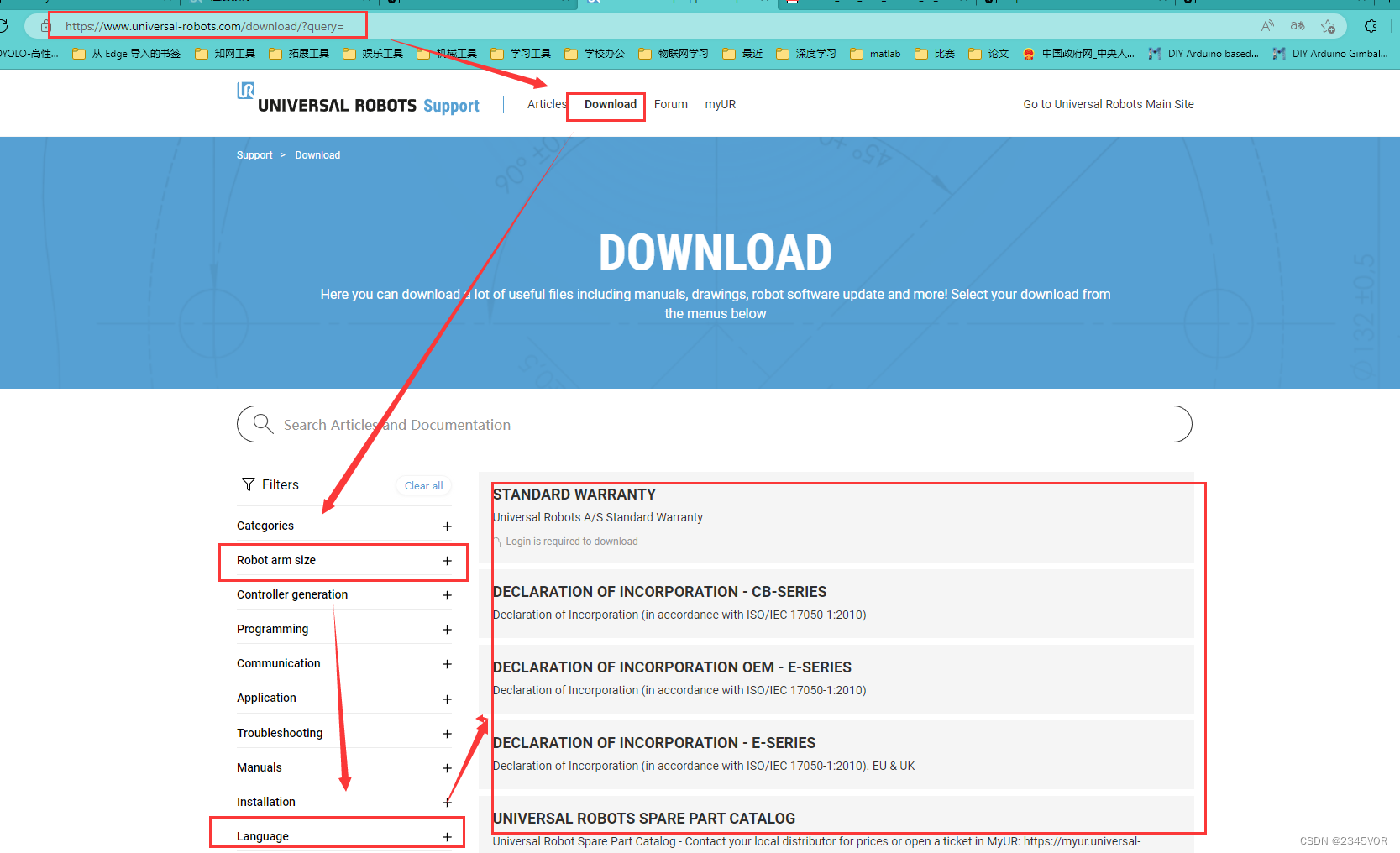
下载文档:https://www.universal-robots.com/download/?query=
UR3中文手册:https://www.universal-robots.com/download/manuals-cb-series/user/ur3/315/user-manual-incl-euromap-67-ur3-cb-series-sw315-chinese-simplified-zh/
在线文档:https://myur.universal-robots.com/manuals