jira confluence做网站东乡建设网站
手术执行器添加摄像头
- 手术执行器文件夹surgical_new内容展示
- 如何添加单目摄像头
- 下载现成的机器人环境文件
- 启动仿真环境
手术执行器文件夹surgical_new内容展示
进入src文件夹下选择进入vision_obliquity文件夹

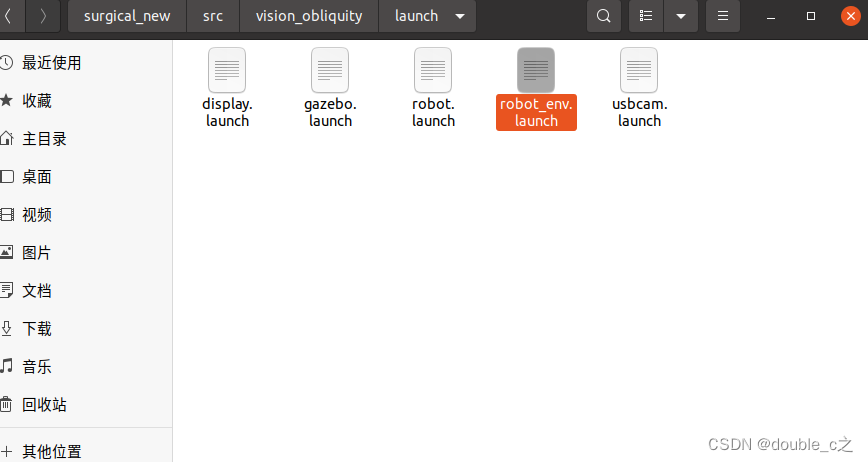
选择launch
有两个可用gazebo中rviz展示的launch文件,robot.launch是添加有摄像头的手术执行器文件,robot_env.launch进一步添加有环境信息的手术执行器文件
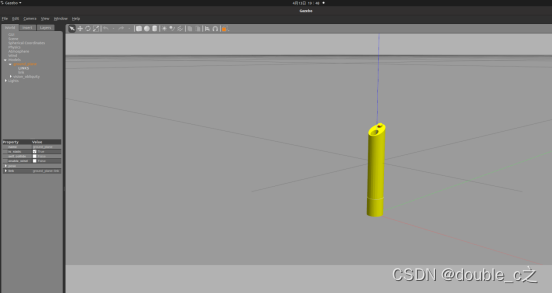
下图是robot.launch展示(红色方块是我们添加的摄像头):
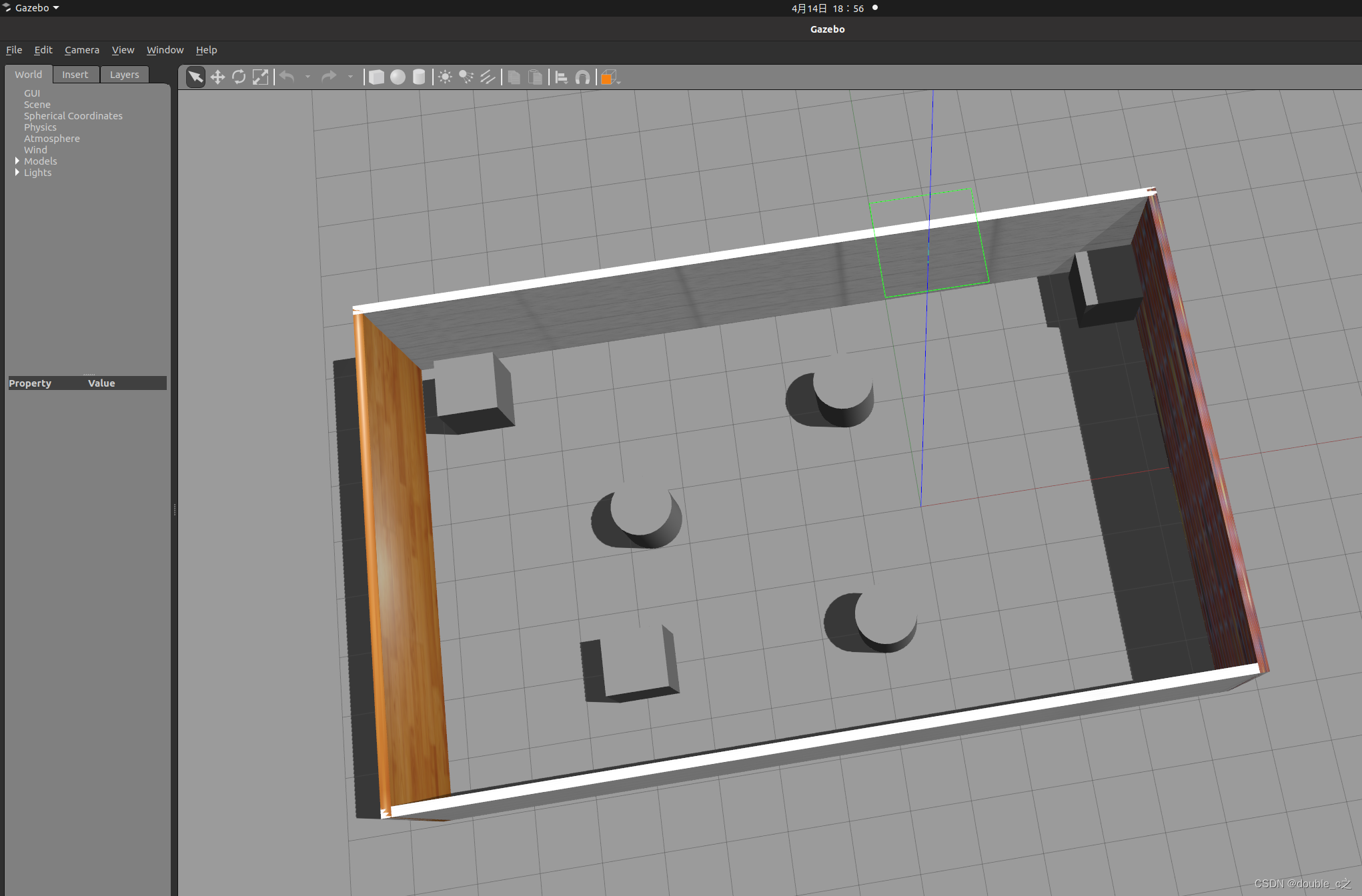
下图是robot_env.launch展示:
如何添加单目摄像头
参考b站学习视频的添加摄像头部分内容: https://www.bilibili.com/video/BV1Ci4y1L7ZZ?p=263&vd_source=9e3999ac88af2c6889c5f00cccc8d215
对应课程文档链接:http://www.autolabor.com.cn/book/ROSTutorials/
实现为我们自己的机器人添加摄像头功能:
实现流程:
摄像头仿真基本流程:
已经创建完毕的机器人模型,编写一个单独的 xacro 文件,为机器人模型添加摄像头配置;
将此文件集成进xacro文件;
启动 Gazebo,使用 Rviz 显示摄像头信息。
- 摄像头 xacro 文件
camera.xacro,代码内容如下:
camera link、将相机作为一个link添加到机器人上的部件link2,于是便有个camera2link2的关节,type为固定的fixed
<!-- 摄像头相关的 xacro 文件 -->
<robot name="my_camera" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 摄像头属性 --><xacro:property name="camera_length" value="0.001" /> <!-- 摄像头长度(x) --><xacro:property name="camera_width" value="0.00025" /> <!-- 摄像头宽度(y) --><xacro:property name="camera_height" value="0.00025" /> <!-- 摄像头高度(z) --><xacro:property name="camera_x" value="0" /> <!-- 摄像头安装的x坐标 --><xacro:property name="camera_y" value="0" /> <!-- 摄像头安装的y坐标 --><xacro:property name="camera_z" value="0.02" /> <!-- 摄像头安装的z坐标:底盘高度 / 2 + 摄像头高度 / 2 --><!-- Create laser reference frame --><link name="camera"><visual><origin xyz="0.000198755346578818 -0.000268944626068074 -0.0105330004865362" rpy="0 0 0" /><geometry><box size="${camera_length} ${camera_width} ${camera_height}" /></geometry><material name="red"/></visual><collision><origin xyz="0.000198755346578818 -0.000268944626068074 -0.0105330004865362" rpy="0 0 0" /><geometry><box size="${camera_length} ${camera_width} ${camera_height}" /></geometry></collision></link><!-- 关节 --><joint name="camera2link2" type="fixed"><parent link="link2"/><child link="camera" /><!-- 需要计算两个 link 的物理中心之间的偏移量 --><!-- 设置joint相对于父节的偏移量 --><origin xyz="-0.00028 -0.0003 0.0102" rpy="0 0 0" /><!-- 设置关节旋转参考的坐标轴,0表示不绕该轴旋转,1表示绕该轴旋转 --><axis xyz="0 0 1" /></joint>
</robot>
- Gazebo 仿真摄像头
通过 Gazebo 模拟摄像头传感器,并在 Rviz 中显示摄像头数据
新建 xacro 文件命名为cameraz_gazebo.xacro,配置摄像头传感器信息:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="my_sensors"><gazebo reference="camera"><material>Gazebo/Red</material></gazebo><gazebo reference="camera"><sensor type="camera" name="camera_node"><update_rate>30.0</update_rate><camera name="head"><horizontal_fov>1.3962634</horizontal_fov><image><width>1280</width><height>720</height><format>R8G8B8</format></image><clip><near>0.02</near><far>300</far></clip><noise><type>gaussian</type><mean>0.0</mean><stddev>0.007</stddev></noise></camera><plugin name="gazebo_camera" filename="libgazebo_ros_camera.so"><alwaysOn>true</alwaysOn><updateRate>0.0</updateRate><cameraName>/camera</cameraName><imageTopicName>image_raw</imageTopicName><cameraInfoTopicName>camera_info</cameraInfoTopicName><frameName>camera</frameName><hackBaseline>0.07</hackBaseline><distortionK1>0.0</distortionK1><distortionK2>0.0</distortionK2><distortionK3>0.0</distortionK3><distortionT1>0.0</distortionT1><distortionT2>0.0</distortionT2></plugin></sensor></gazebo>
</robot>
1.2摄像头 xacro 文件
camera.xacro,代码内容如下:
camera link、将相机作为一个link添加到机器人上link2,于是便有个camera2link2的关节,type为固定的fixed
<!-- 摄像头相关的 xacro 文件 -->
<robot name="my_camera" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 摄像头属性 --><xacro:property name="camera_length" value="0.001" /> <!-- 摄像头长度(x) --><xacro:property name="camera_width" value="0.00025" /> <!-- 摄像头宽度(y) --><xacro:property name="camera_height" value="0.00025" /> <!-- 摄像头高度(z) --><xacro:property name="camera_x" value="0" /> <!-- 摄像头安装的x坐标 --><xacro:property name="camera_y" value="0" /> <!-- 摄像头安装的y坐标 --><xacro:property name="camera_z" value="0.02" /> <!-- 摄像头安装的z坐标:底盘高度 / 2 + 摄像头高度 / 2 --><!-- Create laser reference frame --><link name="camera"><visual><origin xyz="0.000198755346578818 -0.000268944626068074 -0.0105330004865362" rpy="0 0 0" /><geometry><box size="${camera_length} ${camera_width} ${camera_height}" /></geometry><material name="red"/></visual><collision><origin xyz="0.000198755346578818 -0.000268944626068074 -0.0105330004865362" rpy="0 0 0" /><geometry><box size="${camera_length} ${camera_width} ${camera_height}" /></geometry></collision></link><!-- 关节 --><joint name="camera2link2" type="fixed"><parent link="link2"/><child link="camera" /><!-- 需要计算两个 link 的物理中心之间的偏移量 --><!-- 设置joint相对于父节的偏移量 --><origin xyz="-0.00028 -0.0003 0.0102" rpy="0 0 0" /><!-- 设置关节旋转参考的坐标轴,0表示不绕该轴旋转,1表示绕该轴旋转 --><axis xyz="0 0 1" /></joint>
</robot>
封装惯性矩阵算法的 xacro 文件,内容如下的my_head.xacro文件书写,这个文件复制于链接http://www.autolabor.com.cn/book/ROSTutorials/di-6-zhang-ji-qi-ren-xi-tong-fang-zhen/66-urdfji-cheng-gazebo/662-urdf-ji-cheng-gazebo-xiang-guan-she-zhi.html的6.6.2 URDF集成Gazebo相关设置这一小节,将标准的球体、圆柱与立方体的惯性矩阵公式封装成xacro实现:
<robot name="base" xmlns:xacro="http://wiki.ros.org/xacro"><!-- Macro for inertia matrix --><xacro:macro name="sphere_inertial_matrix" params="m r"><inertial><mass value="${m}" /><inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"iyy="${2*m*r*r/5}" iyz="0" izz="${2*m*r*r/5}" /></inertial></xacro:macro><xacro:macro name="cylinder_inertial_matrix" params="m r h"><inertial><mass value="${m}" /><inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"iyy="${m*(3*r*r+h*h)/12}" iyz = "0"izz="${m*r*r/2}" /> </inertial></xacro:macro><xacro:macro name="Box_inertial_matrix" params="m l w h"><inertial><mass value="${m}" /><inertia ixx="${m*(h*h + l*l)/12}" ixy = "0" ixz = "0"iyy="${m*(w*w + l*l)/12}" iyz= "0"izz="${m*(w*w + h*h)/12}" /></inertial></xacro:macro>
</robot>
组合执行器与摄像头
<!-- 组合执行器与摄像头 -->
<robot name="my_robot" xmlns:xacro="http://wiki.ros.org/xacro"><xacro:include filename="myhead.xacro" /><xacro:include filename="vision_obliquity_gazebo.xacro" /><xacro:include filename="camera.xacro" /><xacro:include filename="camera_gazebo.xacro" />
</robot>这里的vision_obliquity_gazebo.xacro是我们自己的机器人xacro文件,也就是手术执行器,替换成你们自己的机器人描述文件。
下载现成的机器人环境文件
1.下载官方模型库
https://github.com/osrf/gazebo_models
2.将模型库复制进 gazebo
将得到的box_hours.world文件复制到 /urdf/worlds下
启动仿真环境
- 进入到手术执行器文件夹surgical_new文件夹路径下
执行如下命令,启动gazebo:
catkin_make
source devel/setup.bash
roslaunch vision_obliquity robot_env.launch
- 进入到手术执行器文件夹surgical_new文件夹路径下
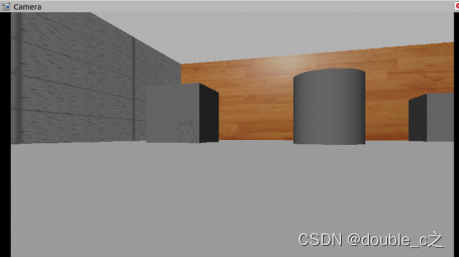
另起一个终端terminal,执行命令,就可以看到摄像头环境信息
rqt_image_view