聊城医院网站建设最近的电脑培训班在哪里
考虑一个向量 a \bold{a} a对其进行旋转, 旋转用旋转矩阵 R \bold{R} R表示, 用朴素的倒数定义进行求导而不是用扰动模型, 我得到了这个过程与结果
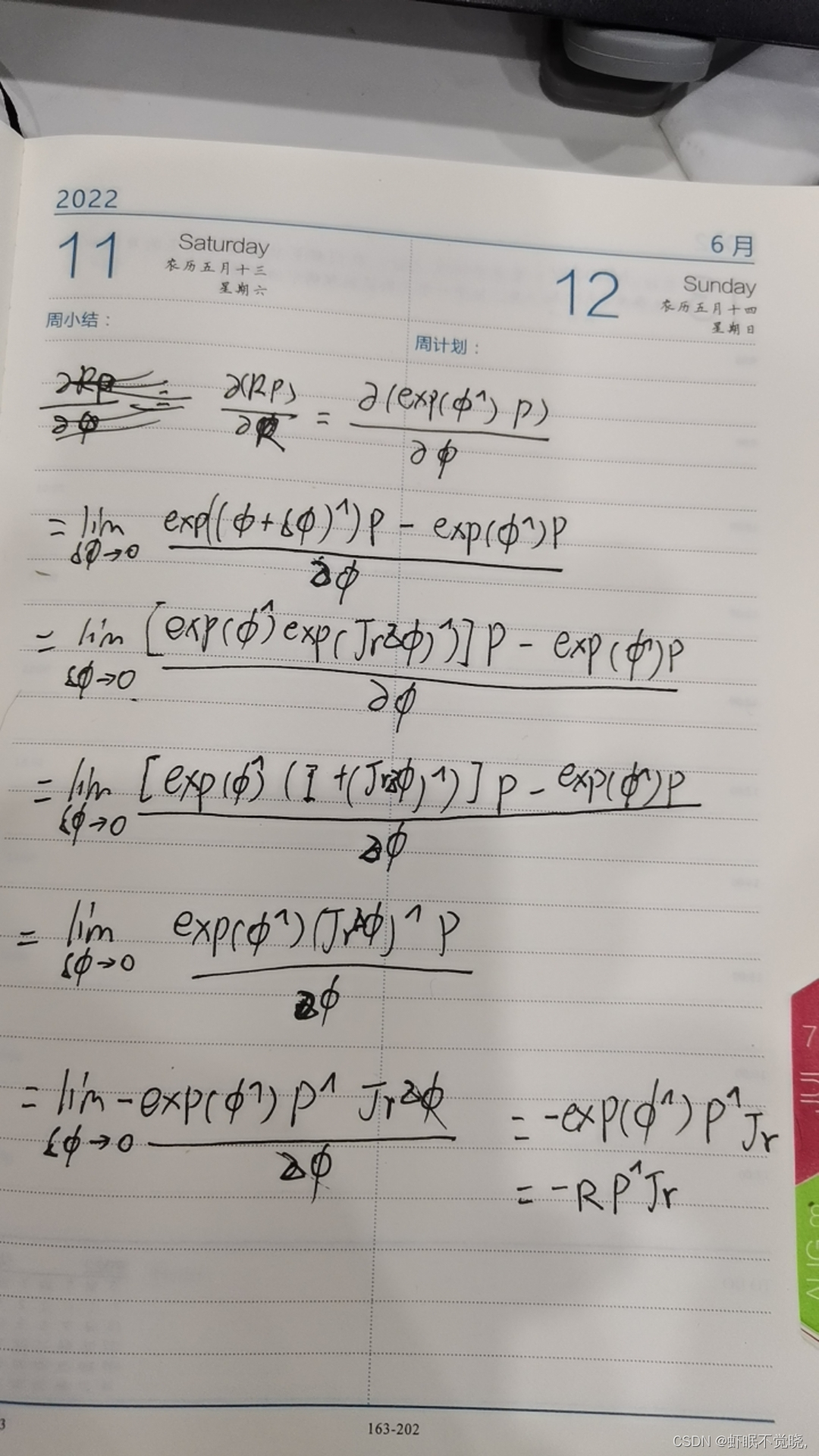
和高博的新书结果 − R J r a ∧ -\bold{R}\bold{J}_{r}\bold{a}^{\wedge} −RJra∧结果不一样, 雅克比矩阵位置不同, 是不是他错啦, 希望有人解答
考虑一个向量 a \bold{a} a对其进行旋转, 旋转用旋转矩阵 R \bold{R} R表示, 用朴素的倒数定义进行求导而不是用扰动模型, 我得到了这个过程与结果
和高博的新书结果 − R J r a ∧ -\bold{R}\bold{J}_{r}\bold{a}^{\wedge} −RJra∧结果不一样, 雅克比矩阵位置不同, 是不是他错啦, 希望有人解答